SPR污水处理系统的智能控制

2.4 PI调节器设计
为了提高系统的静态性能和稳态准确度,系统在采用模糊控制的同时,又引入传统的PI控制,组成了混合型模糊控制器的形式,PI调节器采用位置式数字PI算法,其参数KPI、TI按典I系统的二阶最佳系统进行设计(具体过程省略),ui的变化范围为[-12°,12°],强弱因子Kui=0.133 3,它与uf相加共同完成对药简阀门开度的控制。
3 模糊控制的软件设计
鉴于常规的SPR污水处理系统一般均采用PLC对系统各部分进行开关量控制,为了节省硬件资源,降低成本,根据PLC内部资源的使用状况,在允许的条件下,可在系统硬件方面增加A/D模块、D/A模块、COD在线检测仪及变送电路、药筒电阀门进行硬件改造;也可采用PLC+单片机的模式进行控制。
在软件方面,设计时将增加硬件初始化、软件初始化,参数Ke、Kec、Kuf、T、KPI、TI的预置和各变量的量化,模糊控制表及量化预置、计算、判断等内容,其模糊控制子程序流程图如图2所示。本文引用地址:https://www.eepw.com.cn/article/161084.htm

4 模糊控制仿真与结论
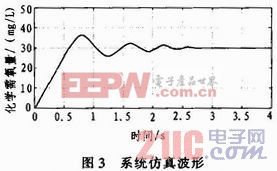
鉴于本设计的控制对象为电磁阀和污水净化罐,根据它们的电磁物理过程和实际运行情况,其传递函数可以用2个惯性环节来等效,为了分析该模糊控制系统对输入信号的响应情况,在MATLAB中,用FUZZY工具箱构造模糊控制器,建立了模糊控制系统仿真模型,仿真参数设置如下:电磁阀的惯性时间常数T1=0.05 s,比例系数K1=4.8;污水净化罐的惯性时间常数T2=0.5 s,比例系数K2=0.44,采样时间T=0.1 s,通过对出水COD的给定设置(30 mg/L)进行仿真,仿真结果如图3所示。从仿真曲线可以看出,控制速度快,超调量小,调节时间短,系统具有良好的动态响应性能、静态性能和较高的鲁棒性。





评论