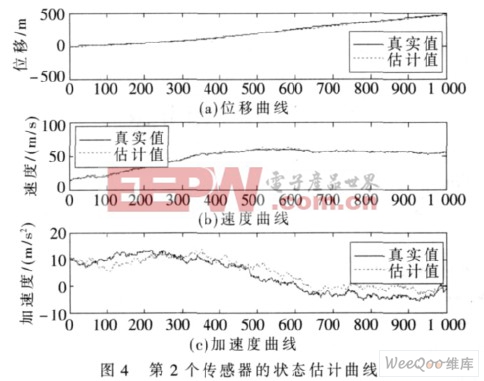
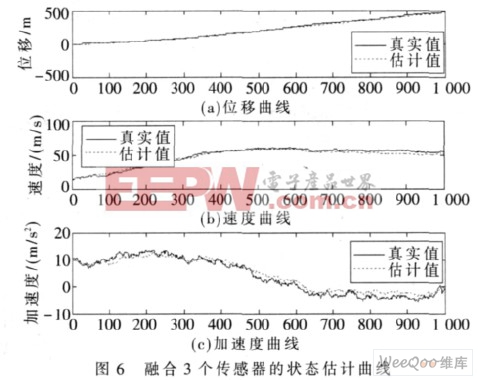
基于卡尔曼滤波器及多传感状态的融合估计算法介绍 作者: 时间:2012-07-29 来源:网络 加入技术交流群 扫码加入和技术大咖面对面交流海量资料库查询 收藏 <a href='https://ad.eepw.com.cn/www/delivery/ck.php?n=a635e61e&cb=INSERT_RANDOM_NUMBER_HERE' target='_blank'><img src='https://ad.eepw.com.cn/www/delivery/avw.php?zoneid=88&cb=INSERT_RANDOM_NUMBER_HERE&n=a635e61e' border='0' alt='' /></a> <a href='https://ad.eepw.com.cn/www/delivery/ck.php?n=a576c0a2&cb=INSERT_RANDOM_NUMBER_HERE' target='_blank'><img src='https://ad.eepw.com.cn/www/delivery/avw.php?zoneid=87&cb=INSERT_RANDOM_NUMBER_HERE&n=a576c0a2' border='0' alt='' /></a> 信息融合技术具有提高系统的可靠性和稳定性等优点, 状态融合估计是其中研究热点之一。本文将基于Kalman 滤波的多传感器状态融合估计方法应用到雷达跟踪系统, 仿真实验表明, 融合3 个传感器的信息所获得的状态估计误差小于利用任何单传感器进行Kalman滤波得出的状态估计误差, 因而本方法对雷达系统的跟踪是很有效的。本方法可推广用于组合导航、信号处理、图像处理、故障检测与容错等应用领域。 上一页 1 2 3 下一页









评论