基于光电管路径识别的智能车系统设计

1.6 直流驱动电机控制模块
本系统中,直流驱动电机控制模块由RS-380SH型直流电机、功率驱动芯片ULN2003、电机驱动芯片MC33886及MC9S12DG128微处理器组成。
功率驱动芯片ULN2003为单片高电流增益双极型大功率高速集成电路,本系统采用了其中两组用于增强单片机输出的PWM信号的驱动能力。
图6为直流驱动电机硬件控制电路图。
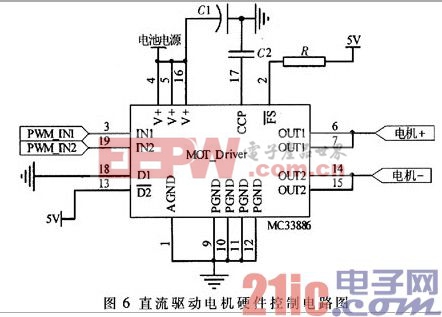
其中,电机驱动芯片MC33886是单片集成的H桥元件,它适用于驱动小马力直流电机,并且有单桥和双桥两种控制方式。D1、D2为使能端,IN1、IN2为PWM信号控制输入端,OUT1、OUT2为输出端。由于智能车从直道高速进弯时需通过紧急降速来保证系统的稳定,所以电机正转时必须能够产生反向制动力矩。因此本系统选择了MC33886的全桥工作方式。
当需要智能车减速时,PI控制器计算值为负,令PWM5输出的PWM信号占空比为零,PWM3输出的PWM信号占空比与计算值的绝对值相同,并且计算值越负,OUT2的电平高出OUT1越多,电机有反转趋势。反之,当需要智能车加速时,PI控制器计算值为正,PWM3输出的PWM信号占空比为零,PWM5输出的PWM信号占空比与计算值的绝对值相同,计算值越大,OUT1的电平高出OUT2越多,电机有正转趋势。
2 软件设计
本系统的控制方案是根据路径识别模块和车速检测模块所获得的当前路径和车速信息,控制舵机和直流驱动电机动作,从而调整智能车的行驶方向和速度。
图7为系统程序流程图。

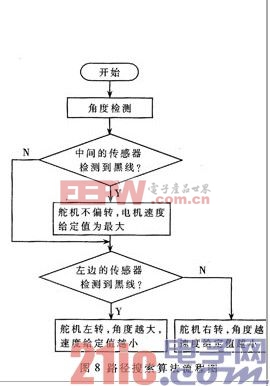
智能模型车的路径搜索算法(LineSearchingAlgorithm)是智能车设计中的关键部分。本系统路径搜索算法采用简单的switch语句,根据检测到黑线的光电管的位置判断舵机的偏转角度,同时给出相应的速度控制信号。
其程序流程图如图8所示。











评论