喷浆机器人电液伺服系统的模糊自适应整定方法

模糊自适应PID控制器的输出变量为,有

其中,
模糊逻辑控制器的输入为
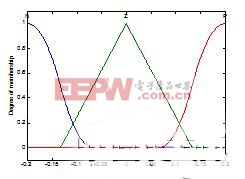
图5 隶属度函数
模糊控制规则是由专家知识,操作经验和系统知识预先设定的,因此我们根据电液伺服系统的特性,设置新的模糊规则如表I~III所示。

4 仿真研究
给定工作臂期望转角阶跃信号
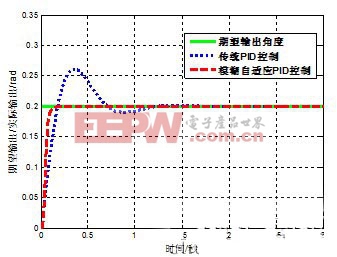
图6 电液伺服系统阶跃响应
由上图可见传统PID控制有明显的超调现象,并有轻微的震荡,这对电液位置伺服系统对机械手的控制十分不利。我们通过模糊逻辑调节PID参数,应用模糊自适应控制器对系统进行优化控制,比较可见,模糊自适应PID控制可以有效地改善动态和静态性能,能够消除震荡,并且响应时间短,有效抑制系统的超调现象,提高了系统的抗扰动能力。
5 结论
本文通过模糊逻辑调节PID参数,设计的电液伺服系统的模糊自适应整定PID控制方法,能够实现对PID参数的在线最佳调整,并获取最优控制参数。可以有效地改善动态和静态性能,有效抑制系统的超调现象,提高了系统的抗扰动能力,这对在实际应用中电液位置伺服系统对喷浆机器人的控制是十分有利的。











评论