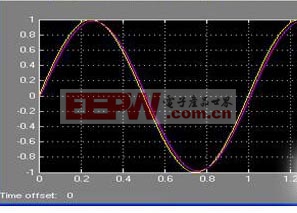
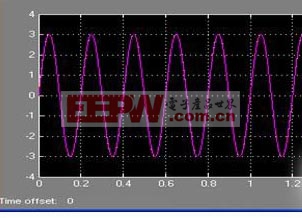
基于干扰观测器的伺服系统PID控制方法研究 作者: 时间:2012-12-24 来源:网络 加入技术交流群 扫码加入和技术大咖面对面交流海量资料库查询 收藏 <a href='https://ad.eepw.com.cn/www/delivery/ck.php?n=a635e61e&cb=INSERT_RANDOM_NUMBER_HERE' target='_blank'><img src='https://ad.eepw.com.cn/www/delivery/avw.php?zoneid=88&cb=INSERT_RANDOM_NUMBER_HERE&n=a635e61e' border='0' alt='' /></a> <a href='https://ad.eepw.com.cn/www/delivery/ck.php?n=a576c0a2&cb=INSERT_RANDOM_NUMBER_HERE' target='_blank'><img src='https://ad.eepw.com.cn/www/delivery/avw.php?zoneid=87&cb=INSERT_RANDOM_NUMBER_HERE&n=a576c0a2' border='0' alt='' /></a> 4仿真研究图5 无干扰观测器时的正弦跟踪图6 有干扰观测器时的正弦跟踪5结论从仿真曲线中可以发现,采用常规PID控制时,在跟踪期望信号过程中,有强烈的极限环振荡且不能很好地跟踪期望信号;而采用PID控制器与干扰观测器的组合控制在跟踪期望信号过程中,干扰观测器对系统和测量信号具有较好的抑制作用,系统的极限环振荡现象消失、其能较好地跟踪期望信号。因此,该控制系统具有较强的适应性和鲁棒性。 上一页 1 2 下一页







评论