帆板角度控制系统的设计与实现

3 硬件电路设计
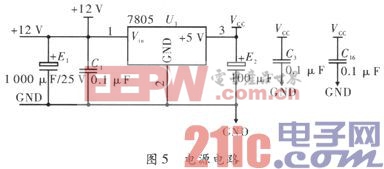
3.1 电源模块
采用开关电源12 V作为直流电源,经过电容滤波、7805稳压后得到+5 V电压,提供给单片机、存储器24C02的供电,如图5所示。
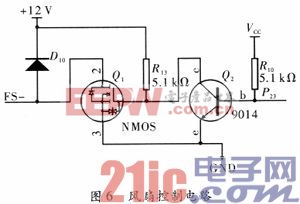
3.2 风扇控制电路
图6为风扇控制电路,FS-和+12 V接风扇,当P23为0时,Q2截止,Q1导通,电机运转。当P23为1时,Q2导通,Q1截止,电机不运转。
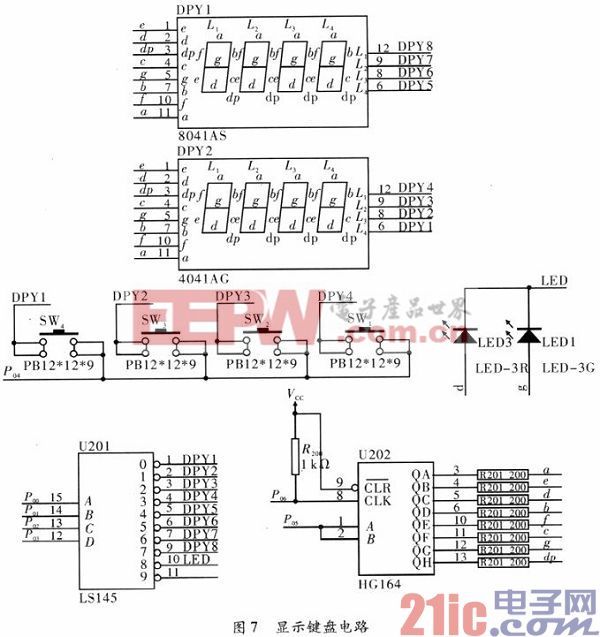
3.3 显示按键电路
如图7所示,系统由两组4位共阴数码管和4个按键组成,DPY1显示测得的角度,DPY2显示设定或改变的角度。4个按键分别为设定键,启动/停止键,-1键和+1键。74LS145为4线-10线译码器/驱动器,A、B、C、D连单片机P00~P03,0~9分别连接两组数码管、键盘和发光二极管,其中数码管的位控制和按键是共用的。74HC164是串行并出移位寄存器,提供接数码管的段码信号。

陀螺仪相关文章:陀螺仪原理










评论