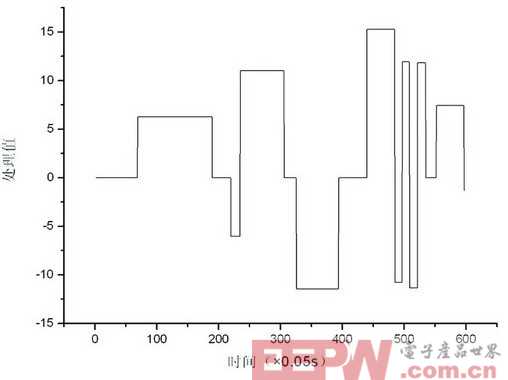
智能车赛道记忆算法的研究 —— 作者:清华大学汽车安全与节能国家重点实验室 周斌 刘旺 林辛凡 郝杰 黄开胜 时间:2006-08-18 来源:电子产品世界 加入技术交流群 扫码加入和技术大咖面对面交流海量资料库查询 收藏 <a href='https://ad.eepw.com.cn/www/delivery/ck.php?n=a635e61e&cb=INSERT_RANDOM_NUMBER_HERE' target='_blank'><img src='https://ad.eepw.com.cn/www/delivery/avw.php?zoneid=88&cb=INSERT_RANDOM_NUMBER_HERE&n=a635e61e' border='0' alt='' /></a> <a href='https://ad.eepw.com.cn/www/delivery/ck.php?n=a576c0a2&cb=INSERT_RANDOM_NUMBER_HERE' target='_blank'><img src='https://ad.eepw.com.cn/www/delivery/avw.php?zoneid=87&cb=INSERT_RANDOM_NUMBER_HERE&n=a576c0a2' border='0' alt='' /></a> 图3 2004年韩国大学生智能车比赛赛道图 虽然我们已经能够方便地从初圈记录下的曲线图中判断出赛道的特征,但是我们还需让单片机能自动识别出这些信息,并过滤掉一些毛刺和波动。经过反复的研究,我们已成功地找到了合适的处理方法,并将图2的曲线图处理为图4所示的路线图。在处理后的路线图中,处理值为0时表示此时车处于直道上;当处理值大于0时表示车处于向左转的弯道上,曲率半径与处理值成正比关系;反之亦然。这样,第二圈就可根据此信息进行相应的最优决策。 图4 处理后路线图 上一页 1 2 3 4 下一页


















评论