基于CAN总线可通信智能电流继电器的设计

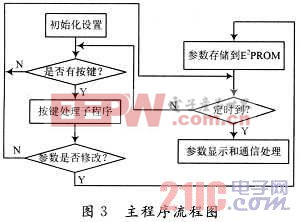
在智能节点控制系统软件设计中,为了充分而合理的利用硬件资源并且构建一个清晰的程序构架,把程序大致分为:初始化程序、数据采集和转换程序、监控存储程序、按键和显示程序、CAN通信程序、数据、计算处理程序以及起整体调度作用的主程序等模块。主程序流程如图3所示。本文引用地址:https://www.eepw.com.cn/article/156271.htm
采用VB对上位软件进行编程,调用CAN232智能CAN接口卡随机提供功能强大的CAN接口函数库文件(232CAN.h、232CAN.lib、232CAN.dl l),从而很方便的实现了CAN协议CAN2.0A和CAN2.0B规范PeliCAN的数据通讯。
上位PC节点的监控制程序和下位节点的设计相类似,也使用了模块化的设计方法。可以很方便的在现有的程序基础之上进行改造,通过添加新的模块以达到功能扩展的需要。
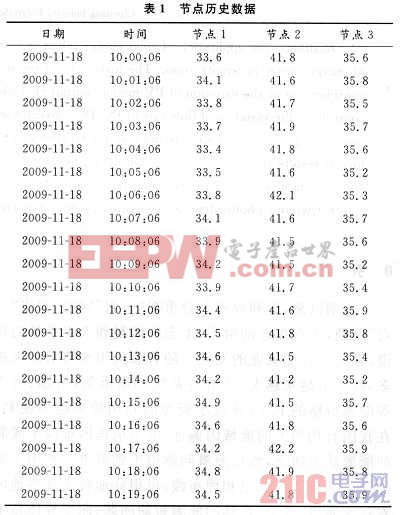
上位PC节点的监控软件主要由主界面、历史数据和参数设定界面组成。其中主界面包含了上位节点设计中的主要和功能操作:串口和总线参数的设定、通信连接、数据发送、应答信息和工作状态以及监控数据显示等。历史数据界面通过在上位PC节点的Windows操作系统下用Acess软件建立一个数据库,如表1所示的数据为下位节点在一定时间内运行采集的电流值。在VB中调用两个控件Data和DBGrid将数据库和上位节点的监控界面连接起来。参数设定界面可对节点的设定电流值和时间值进行修改,然后点击设定输入按钮即可完成设定参数的发送。
4 结语
本文设计的基于CAN总线可通信的智能电流继电器,不仅能够完成传统意义下电磁式电流继电器、时间继电器和信号继电器组合在一起才能实现的限时速切功能,还可使现场电器与上位机实现双向通信功能。通过上位PC机直接对电流和时间参数进行设定,还可直接从上位机查看继电器采集的线路实时状况参数(如线路电流和继电器动作情况)。不但通讯效率高、抗干扰性强、传输距离较远,而且与其他总线相比具有造价低廉、实现简易的优势,在低成本自动化领域将有着广泛的应用前景。

时间继电器相关文章:时间继电器
基尔霍夫电流相关文章:基尔霍夫电流定律







评论