基于信号接收系统的室内无线网络定位

式中:

重复以上过程,直到△x,△y足够小,满足一预先设定的门限ε,即(△x+△y)ε,此时的(x,y)即为定位节点的估计位置。
4 实验验证
实验是在实验室走廊(4m×30m)进行的,实验环境如图4所示。选用的是ZigBee硬件平台作为通信平台,该平台CC2431自带定位引擎,可以实现位置估计,并通过实验比较两种算法的差异。
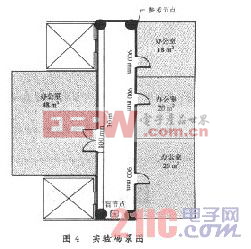
CC2431使用的三边测量法进行位置计算,采用均值滤波对RSSI进行滤波处理。ZigBee开发平台如图5所示。

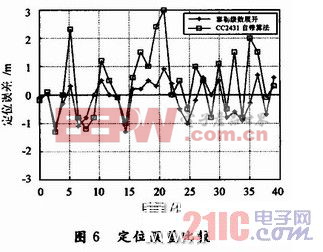
在实验环境中布置4个节点作为参考节点,位置分别定义为(O,0),(0,4),(30,O),(30,4)。确定A和n的值,实验环境与图2的实验一样。可以得知,A=41,n=2.3。在环境中任取31个点,分别测得该点的实际位置(x,y);使用CC2431得到的位置(x’,y’),使用本文提
出的算法得到位置(x,y)。比较两个位置的误差大小d'与d,如图6所示。
其中:

由图6可以看出,经过线性回归分析和高斯滤波,然后用泰勒级数展开,最终求得位置误差大约在1m左右,而CC2431的定位误差在2~3m左右。本文提出的定位算法较好地改善了定位效果,使定位误差主要集中在1m左右,基本能够满足室内定位对误差的要求,提高了定位精度。
5 结语
对基于RSSI的室内定位算法以及RSSI测距进行了全面分析。通过线性回归分析对参数进行优化,高斯模型对RSSI进行滤波,提高了测距的精度。最后采用泰勒级数展开法进行位置计算,比较了CC2431的定位算法,减小了定位误差,达到了提高定位精度的目的,证实了定位算法的优越性。







评论