基于PTR6000的足球机器人无线通信系统的设计

2.2 接收器的设计
接收器电路图如图2所示。接收端装在每个机器人小车上,由于机器人小车的控制采用DSP控制器TMS320LF2407A,因而在接收端PTR6000无线通信模块就采用TMS320LF2407A来控制。因PTR6000模块与单片机采用的电平标准同为TTL/CMOS电平,所以在接收端直接将两者连接。上电以后TMS320LF2407A首先配置PTR6000模块,先将CS,CE设为配置模式,TMS320LF2407A通过PTR6000的CLKI,DATA将120 b配置数据移入PTR6 000模块,完成无线模块寄存器配置后,由TMS320LF2407A控制CS,CE启动接收模式。当接收数据的地址与本机地址一致时,通过DRI输出中断指示(高电平有效),DSP通过DATA,CLKI接收数据。
另外,在本系统设计中增加了跳频拨码开关,与之对应的发射电路也设置了跳频拨码开关,通过调整拨码开关的位置输入不同的电平组合信号便可由软件跳转到相应频道,以适应比赛时更换频率的需要。
3 无线通信系统软件设计
3.1 无线通信方式与协议
由于足球机器人的活动空间有限,通常采用单向通信方式。为了实现一对多的通信,采用广播方式,所有的机器人采用与发射器相同的通信频率。每个控制周期无线发射器发射一帧数据给本方所有机器人,各机器人根据自身编号读取数据帧的不同字段,获得自己的运动控制指令。
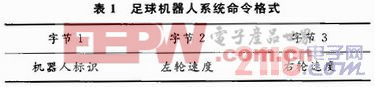
本系统的足球机器人采用两轮差动方式驱动,因此,机器人的运动控制指令就是该机器人的左右轮速度设定值。足球机器人系统命令格式如表1所示。赛场上的机器人小车首先接收机器人标识字节,并与自身的标志相比较。当比较匹配时,则认定后面的2个字节是发送给本机的指令,准备接收;否则,屏蔽掉后面的2个字节的指令,等待下一组的指令信息。
3.2 收发器的软件设计
通信系统的软件主要有两部分:一是AT89LS52上的从RS 232接收和往PTR6000发射数据;二是DSP2407A从PTR6000接收数据。图3给出它们的流程框图。

发射器中的单片机AT89LS52接收到上位机的通信指令后,将接收到的数据按照通信协议打包,然后通过对CLK1引脚和DATA引脚编程按照数据手册上的时序图将数据按位写入PTR6000并以广播形式发送给各个足球机器人。
足球机器人的接收程序则由机器人上的DSP2407A执行,每个机器人根据各自设定的编号,从接收缓冲区取出相应左右轮速度值。接收端的PTR6000在收到与本机地址相同的数据包后将DR1数据就绪引脚置为高电平,由于本设计将此引脚连接到了DSP的XINT2中断引脚,因此DR1的上升沿将导致DSP转入执行中断服务程序,通过对CLK1和DATA引脚编程以数据手册提供的时序读取接收数据。
4 实验数据与结果分析
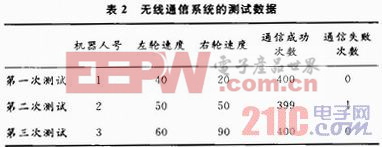
为了测试无线通信子系统的效果。这里做了实验,从发射器发送相同次数(400次)的数据,记录机器人接收到数据正确(通信成功)和错误(通信失败)的次数。实验结果如表2所示,可以看出,通信成功率很高,可靠性很好。
5 结语
本文详细介绍了基于PTR6000通信模块所开发的足球机器人无线通信子系统的设计与实现。实验证明,本设计使机器人小车系统在精度和运行性能方面得到很大提高,可以满足足球机器人对速度、可靠性及抗干扰能力的要求。









评论