2009年飞思卡尔智能车大赛特等奖技术报告(节选)
——
动态图像模糊主要是在光线较暗的环境下,为了保持图像亮度,摄像头自动将曝光时间增大所致。要彻底避免图像模糊情况的出现,就要手动设置摄像头曝光时间,于是我们又测试了1/3数字摄像头OV7620,通过SCCB将摄像头设置到手动模式,手动修改其曝光时间。
图像采集方案
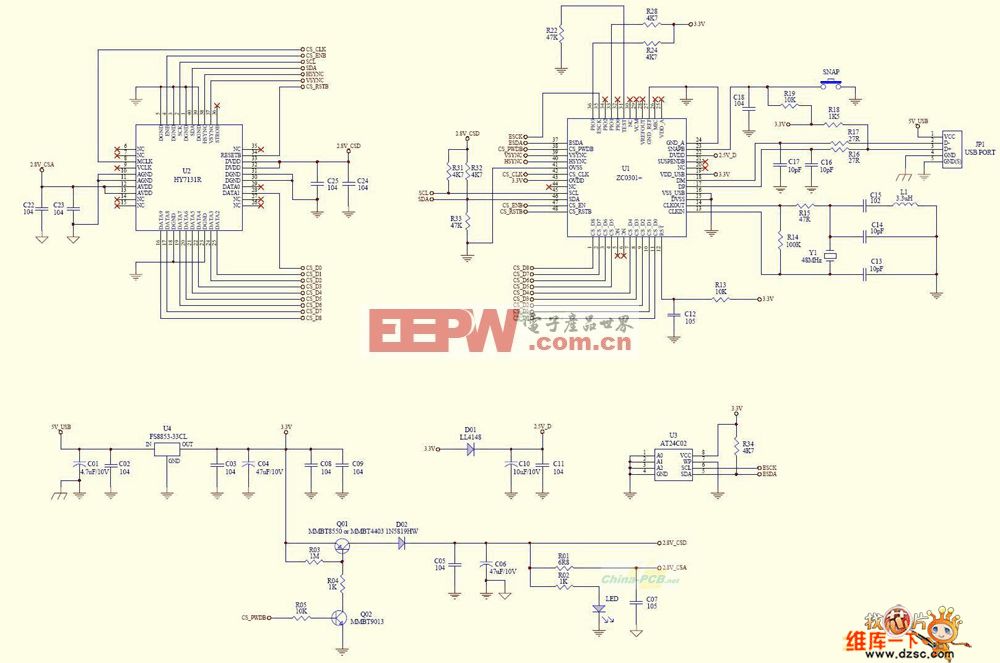
今年我们测试了很多种采集方案,首先由于更换了主频更高的S12XS128,我们对其内部AD又进行了测试,结果很失望,尽管主频增高,最高精度从10bit增加到了12bit,但是AD的转换时间并没有多少改善,88MHz主频下行像素在80左右。之后我们又测试了外部二值化采集、数字摄像头采集、外部AD加LM1881采集、视频解码芯片采集。其中视频解码芯片图像质量最好,并且有图像预处理电路,但由于实验电路还在测试阶段,本次比赛并没有启用,仍然延用了去年的外部AD采集方案。
电机驱动模块
去年我们使用SI4430,模仿电子调速器制作了驱动电路,取得了不错的效果,但是对于能耗刹车的刹车能力始终存在争议,因此我们对能耗刹车和反压刹车做了对比测试。
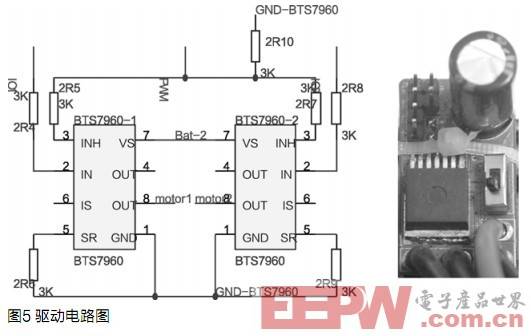
参考第三届上海交大SpeedStar队的技术报告,我们使用BTS7970制作了驱动电路,其原理如下。该电路有一路PWM输入,两根I/O线作为模式选择线,可以有正转、反转、能耗刹车三种工作模式。














评论