基于虚拟仪器技术的手机翻盖耐久性测试系统
基于虚拟仪器技术的手机翻盖耐久性测试系统
本文引用地址:http://www.eepw.com.cn/article/8190.htm 手机翻盖耐久性测试即将待测翻盖手机重复开合预设的次数,然后观察手机的各部分性能是否完好,这在翻盖手机的生产过程中是相当重要的一环。以往采用气动方式的系统运行速度较慢(约为每2秒1次)且操作界面不够友好。本文介绍的基于虚拟仪器技术的手机翻盖耐久性测试系统采用NI Motion 控制模块控制伺服电机进行驱动,运行速度可达到原来的4倍多且同时可对4部手机进行测试,而采用National Instruments公司的虚拟仪器(LabVIEW)进行开发,使操作界面非常友好。
在测试过程中操作人员针对每批不同型号的手机在初次测试时可使用微调功能将各个参数调整至理想值,并且可将这些参数存成相应的配置文件以备以后测试同样型号手机时使用,这样大大减少了每次测试时的重复操作,提高了系统的自动化程度。
运动控制原理
运动控制的原理简单来说即由运动控制模块发出控制信号,如脉冲信号和模拟电压量等,这两种控制信号分别对应于位置控制模式和速度控制模式,伺服电机在相应的模式下接收到控制信号便能按照预定的方式运动。但是电机的运动存在误差,特别在模拟的速度控制模式下,因此需要电机发出编码信号反馈到运动控制模块,使运动控制模块能够根据实际的运动情况做出相应的补偿来消除累计误差,这一点对于本系统这样需要长时间连续运行的系统来说尤为重要。下图为运动控制的简单原理示意图:

图1 运动控制原理示意图
系统概述
本系统利用NI Motion 控制模块对伺服电机运动进行速度控制,按照用户设置的参数驱动相应的拨片、拨杆控制手机翻盖的开合。整个系统框图如图2所示:

图2 手机翻盖耐久性测试系统框图
整个系统由两部分组成:运动控制部分和测试平台部分。运动控制部分由NI PXI控制器和运动控制模块NI PXI-7344发出运动控制电压信号V-REF,通过NI UMI 7764接至伺服电机驱动器。测试平台部分包括两套独立的平台,每套平台有一组电机控制4台待测手机翻盖的开合(见图3)。全部4台电机的控制信号分别由NI PXI-7344的4轴提供。每台电机上均有编码信号反馈至运动控制模块以形成闭环控制回路,另有Forward Limit和Reverse Limit信号反馈至运动控制模块用以确定系统的初始位置以及防止电机运动超出极限位置。

图3 测试平台示意图
硬件连接
硬件配线包括伺服单元与伺服电机的连接、运动控制模块与伺服单元的连接。其中伺服单元与伺服电机的连接有专用的电缆和相应的端子定义,与伺服单元和伺服电机的的类型有关。下图是运动控制模块与伺服单元的连接以及限位信号的连接图:

图4 运动控制模块与伺服单元及限位信号连接示意图
软件结构和功能
整个软件是在National Instruments公司的面向对象的图形化编程语言LabVIEW 7.1下开发完成的,从上到下分为三层:高层通讯层,中层运动控制层,以及底层的驱动程序和开发环境支持。
底层开发环境和驱动程序接口是由软硬件厂商提供的,包括LabVIEW 7.1图形化编程环境和运动控制板卡的驱动程序。中层的运动控制层是在LabVIEW环境下编程实现电机的运动控制,包括电机运动位置、速度以及对于本系统整体的运动流程。高层的通讯层是用于将用户设置的各项参数传递到运动控制层,同时将用户所需信息如当前运动速度、剩余时间等反馈到用户界面。
基于虚拟仪器的操作界面
本系统使用Labview 7.1设计了友好的操作界面,如图5所示:

图5 手机翻盖耐久性测试系统操作界面

伺服电机相关文章:伺服电机工作原理
合成孔径雷达相关文章:合成孔径雷达原理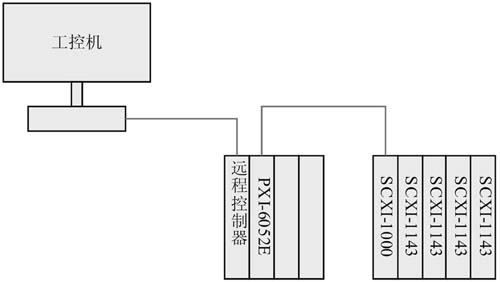


评论