软件GPS原理与应用

全球卫星定位系统发展至今己有二十余年的历史。其应用主要都是基于一个完整的,独立的系统方案,主要架构不外乎天线、射频前端、基带处理器、中央处理单元、存单元、晶振等。所设计出的产品多为航空用,船用,及车用之导航设备,由于尺寸,功耗,成本,及接收灵敏度等的种种考虑而难以与其它个人消费性产品相结合,如个人移动电话。本文将介绍最新的技术架构,仅使用射频前端芯片,及相应的软件而能与行动装置相结合之软件卫星定位方案。
本文引用地址:https://www.eepw.com.cn/article/80699.htm全球卫星定位系统概况与介绍
全球定位系统(Global Positioning System)是一套由美国国防部建构的卫星定位系统,其基本原理乃是利用绕着地球的24 颗卫星所发射的信号,再加以几何上的计算,来得到接收者的笛卡尔坐标(Cartesian Coordinate),另一个与此相当的系统是由前苏联所建构之定位系统(Global Navigation Satellite System,GLONASS),基本上,此系统也是由24 颗卫星所组成,这24颗卫星分别分布在3个轨道面,每一个轨道面又分别由8 颗卫星以相差45度(Latitude)均匀分布,此轨道面之高度约为19100Km,卫星运行一周需费11小时又15分钟,因为本文主要是介绍美国所建构之定位系统(Navstar GPS),所以有关GLONASS的部分就不多叙述。
简单地说,全球定位系统是一个以空间为基准,利用无线电波与时间差来测量距离的一个系统,它能够提供精准的位置数据、速度、以及时间。整个系统可以被区分为三大部分,我们称之为Space Segment、Control Segment和User Segment。
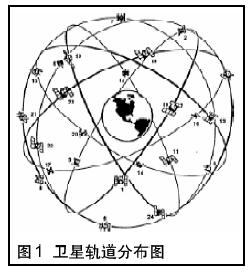
第一个Space Segment,主要就是由24颗卫星运行于半同步轨道,所谓半同步轨道指的就是卫星运行一周需费大约12小时(11小时58分钟) 所以在一天之中,同一颗卫星刚好出现在一个固定不动的使用者的头顶上两次(23小时又56分钟),这24颗卫星以每个轨道4 颗卫星均匀的分布在6个轨道面上,每个轨道面都与赤道相差55度的倾斜角,而这些卫星所在的轨道高度平均约为20200Km,图1为卫星轨道分布图。
这24颗卫星所发射出来的测距信号有两个频道( D-Band ),其一称之为L1,发射频率为1575.42MHz;其二为L2,发射频率为1227.6MHz。这两个为载波频率负责将扩频信号以高频载波来传送,GPS所使用的是扩频通讯(Spread-Spectrum)技术。扩频所调制的测距码(ranging codes)又可分成两种:一为1.023MHz的C/A码(coarse/acquisition codes),顾名思义,依据这个码所得到的精确度较为粗略,而且C/A码也只用L1来调制,专门开放给一般商业用途的使用者;另外一个测距码是10.23MHz的P码( Precision Codes),这个码同时调制在L1及L2载波上,由于P码的Chip较短,因此能够得到较精准的定位。这两种测距码都能够被用来测量卫星与接收者之间的距离,然而通常P code还会被加密而且也只开放给被授权的使用者,所以P Code 通常也只应用在军事用途的定位系统上,也因为有这样不同的两组码,全球定位系统又被区分成所谓标准定位服务(Standard Positioning Service,SPS),以及精确定位服务(Precise Positioning Service,PPS),其中标准定位服务就是只使用C/A码在L1载波上,而精确定位服务除了使用C/A码在L1载波上,也再加上P code于L1和L2两个载波,除了这些测距码之外,最后也是最重要的就是一个50Hz的数据信息码。这个码载有的数据包括了卫星时序数据、卫星精确轨道数据(ephemeris),此数据只含有发射信号的卫星本身的轨道数据、卫星基本轨道数据(almanac data),此数据含有所有卫星的基本轨道数据及信号传播于电离层的修正数据。
Control Segment,这主要是由各个位于不同地点的地面控制站台所组成。其主控制站台(Master Control Station, MCS)位于美国科罗拉多州,其余几个站台则均匀沿着赤道分布。这些地面控制站的主要任务就是间测及控管这些在太空中运行的卫星,其功能包括有卫星轨道控管、卫星轨道数据更新、卫星本身维护等。这个系统之运作流程是由各个子站台分别接收它们所锁定的卫星的轨道数据,然后透过美国的防卫卫星通讯系统将数据传送到主控制站台进行轨道数据的估计及再预测,然后再将新的轨道数据通过地面天线站上载至各个卫星。
最后一个部分User Segment,才是跟一般使用大众有密切关系。所谓User Segment,其实指的就是GPS接收器,也就是本文要探讨的主角,其功能射频接收、译码以及处理卫星的轨道数据,进而计算出接收器的位置。
GPS的传统架构
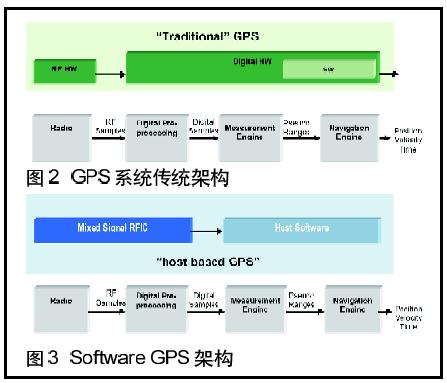
一般商业用的GPS芯片组大体都是由天线、低噪音放大器、前端滤波器、射频IC、晶振、 存储器芯片与基频IC(内含中央处理单元)所组成。如图2,射频IC的主要功能是将GPS的1.57542GHz载波降频至基频,其主要是由低噪声放大器、混波器、自动增益控制、锁相回路、以及模/数转换器所组成。一般这样的芯片设计都会采用Bi-CMOS的制程以兼顾Bipolar快速、高增益、高驱动力、低宽带噪声和CMOS的低功耗高密度等好处。绝大多数的基频信号处理IC都是由CMOS制成,一般的基频信号处理芯片除了具备有de-spread的correlators之外也都还包含有中央处理单元,以处理追踪及导航的算法而实现卫星信号追踪及几何定位之计算。中央处理单元也负责与存储器芯片之地址/数据运算及与外部I/O的接口如UART。
这样的传统架构存在着一些瓶颈而无法应用在如移动电话等的消费性电子产品上。第一个也是最关键的问题就是接收灵敏度的问题。一般的消费者在使用GPS 时,多数会处在市区内,甚至在建筑物内,这样的环境绝对是GPS的天敌,因为在这样的环境下,卫星传送下来的信号不仅会被衰减,多重反射(multi-path),甚至完全收不到任何信号(室内)。为了改善接收灵敏度的问题,各家厂商无不在RF IC 及追踪导航算法上力求精进。甚至更有厂商与移动通信网络(如GSM/GPRS 或WiFi热点)相结合,提供辅助导航之功能,使得即使GPS接收器在室内,仍然可以得到定位。
第二个瓶颈是消耗功率过大。在手持式的电子产品中,省电一直是一个最重要的课题。目前在市场上各家IC 的功率消耗分别从150mW到200mW不等。除了基本的耗电需要再继续降低外,有效的电源管理设计也成了重要的设计之一。尤其是传统架构需要用上一颗CPU使得功耗问题一直无法改善。 而且芯片设计也会降低电压至1.8V 以降低功耗。
第三个障碍是GPS接收器的尺寸大小。一般的GPS接收器设计,大体包含有射频芯片、GPS ASIC处理器芯片、CPU和内存。再加上外围其它电路后,其尺寸约略比一般的名片稍小。然而这样的尺寸完全不能符合手持式电子产品的需求。最后一个就是成本问题。凡是要同消费大众普及化的产品,在价格上一定要有竞争力。 而传统方案整个BOM成本则至少要15美元以上。
软件GPS原理
所谓软件base全球卫星定位方案,简单地说就是将软件移植到主机(host base)上去执行,以分享中央处理单元(CPU),存储器芯片等,以进而达到省电,低成本,低功耗及节省板空间的需求。 其架构可由图3表示。
这样的方案只需要外部一个射频芯片,其它都是利用主机(host base)的固有资源。 前端射频芯片将射频信号降到基频,再经由仿真/数字转换器将信号快速取样出来,一般是由SPI (serial port interface)或SD Interface接到主机上的中央处理单元。接着由移植到主处理器的测量计算单元(Measurement Engine) 将射频取样信号转换成原始的GPS各种测量信息(raw GPS measurements), 再由导航计算单元(Navigation Engine)计算出所有的定位数据,速度,时间等。在硬件部分,一般的冷开机模式下大略需要消耗掉主机上的中央处理单元约50MIPS到400MIPS不等,不同厂家的方案会有不同的系统需求。
软件GPS应用
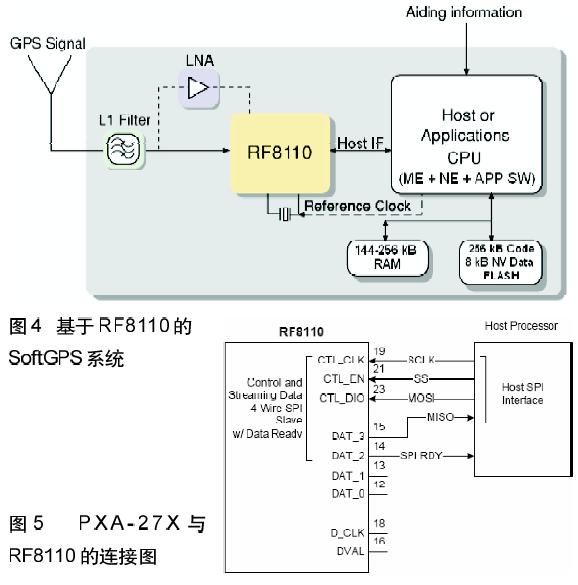
本节将以RF Micro Devices的RF8110为设计实例来说明softGPS的技术应用。由前节所述原理可知,softGPS需要将其运算软件移植到主机端的应用处理器上。其硬件架构,如图4所示。
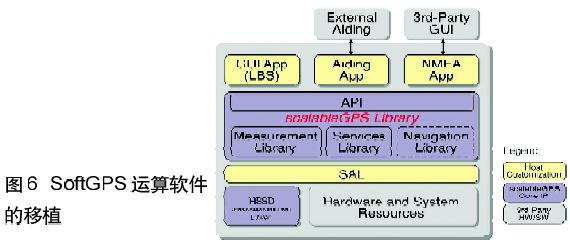
所以我们再选用Intel XScale的PXA-27X为主应用处理器,并以Single SPI(Serial Port Interface)模式来加以说明。其接口连接如图5。
在此应用中,这个接口使用4线SPI从端口来传送控制信号及GPS数据流。其中MISO(Master In Salve Out)及MOSI(Master Out Slave In)分别做为单向GPS串行数据传输用。而SPI RDY则告诉主机其GPS数据流己待命,然后主机就要下读出命令。在软件移植上,则由图6做个说明。
RF8110提供可移植性高的ANSI C sGPS Library,负责从GPS取样信号中计算出位置,速度及时间。sGPS Library与系统软件的接口为SAL(System Abstraction Layer)。主机端可以在其上开发导航应用软件,可以只是简单的NMEA输出,或是复杂的地图导航。
结语
本文主要阐述了softGPS如何克服传统方案,应用在手持移动装置上的瓶颈,并说明softGPS的原理及其应用。在讲究尺寸,功耗及性能的行动装置上,softGPS以仅仅单一射频芯片及可移植性高的运行软件来搭配主机端的应用处理器,可以容易地达到在尺寸,功耗及性能上的各项要求,使得卫星定位系统内建于Smart Phone,PDA更为普遍。目前市场上绝大部分的Smart Phone及PDA,其应用处理器都有足够的能力来处理softGPS的运行软件。再加上辅助式定位系统aiding GPS,将使得GPS的应用更为方便及实用。一旦GPS的导航功能搭配上适当的电子地图与规划完善的导航软件,则未来GPS 将会成为人人必备的生活必需品。■













评论