也谈LED驱动
——

LED:本文所说的LED主要是指下列几种:
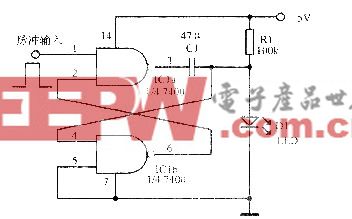
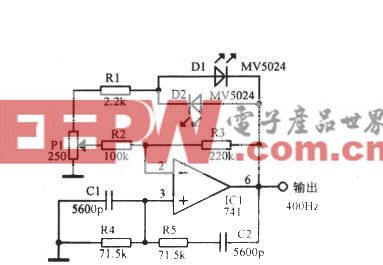
7-段数码LED,分共阴和共阳两种,原理图见1和2;

常用nxm LED点阵:如8x8 LED 点阵模块、5x7 LED点阵模块等,其也分为共阴和共阳两种;
单个LED管。
所谓共阴极,即是将所有LED的阴极连接到一起,而共阳极则相反,所有的阳极被连接到了一起。但不管哪种结构,其显示设计的原理基本相同,唯一的是其驱动的电路的设计有所差异,一般共阴极采用推(Push)电流的方式来驱动,而共阳极结构则采用拉(Pull)电流的方式来驱动。
根据LED显示的硬件设计方法的不同,LED显示驱动分为静态法和动态法两大类,其具体的说明和编程方法分述如下:
1.静态显示驱动法:
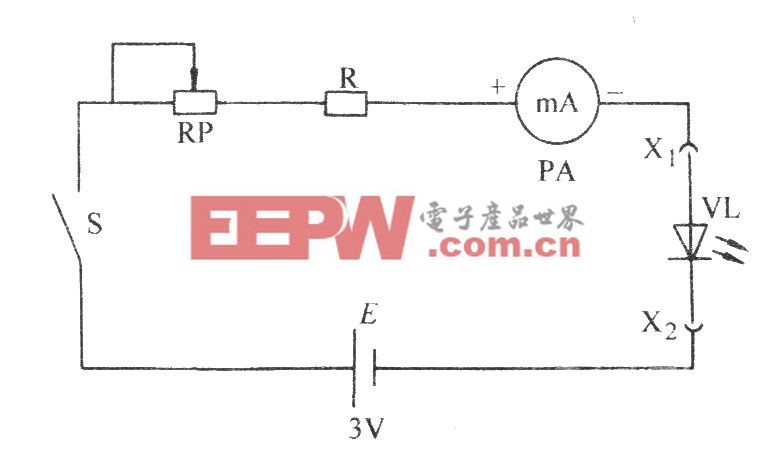
所谓静态显示驱动法,即是指每一个LED灯分别对应一个独立的IO驱动口;其点亮和关闭由该IO来对其进行控制,互不干扰,见图3(注:对于IO驱动能力弱的MCU,必须增加外部的驱动芯片或驱动三极管等器件)。此种设计一般应用在对单个LED的驱动或LED数量较少,且所选的MCU IO比较充裕的情况下。比如一些项目的LED指示灯、产品的设计中只有一个7-段LED码需要显示等。
由于每一个LED均由独立的IO口来控制,因此此种显示驱动的软件设计比较简单明了,无需特别的处理,在需要点亮和关闭时设置相应的IO输出口的电平即可(即“0”或“1”,具体须根据驱动电路的设计来决定)。

图 3
优点:电路设计简单,编程简单,而且LED的亮度控制容易,只需在驱动端增加相应的电流调节电阻即可方便地实现亮度的调节(对于存在独立驱动的设计,还可以通过调整驱动电压来达到亮度的调节)。
缺点:由于每一个LED灯需要一个IO口,因此对IO口的需求较大,不易实现大数量的LED驱动和显示,扩展性能差。
2. 动态的显示驱动法:
与静态显示方法不同,动态LED显示的设计方法是将不同LED模块的所有的LED的驱动端一对一地连接到一起,见图4,而将其公共极(阴极或阳极)分别由不同的IO口来驱动(主要针对7-段码和LED点阵模块)。在此,我们称其公共极为扫描线或地址线(因此种连接方法类似于存储器的内部连接,每个LED点相当与Memory中的一个Bit),不同的LED模块(类似于Memory中的一个Byte)用不同的扫描线地址线来进行选定。

由于所有的LED模块公用了驱动端,因此LED的驱动不再像静态法一样为每个LED所独享,因此其驱动的设计方法也与静态法完全不同,需要采用分时扫描(也称动态扫描)方法来实现对所有LED的显示驱动,其原理如下(以图4为例):
a. 将A0设置为高电平,也即允许第一组LED显示,同时将A2,A3,A4设置为低电平,也即关闭该阴极所对应的LED组的显示;
b.在P0口输出A0组对应的显示数据(也称为Pattern),如字符点阵数据,7-段码对应的数字的数据等,该数据可以通过ROM表的形式来预先定义;
c. 保持一定的时间T,该时间即为所设定定时器的中断时间;
d. 将A0口设置为低电平,关闭A0组LED的显示;
e.将A1设置为高电平,其他几个设置为低电平,开启A1组对应的LED的显示;
f. 在P0口输出A1组对应的显示数据(也称为Pattern,意义同上);
g.重复以上步骤,直到所有组被扫描一遍,然后又从A0组开始下一个循环,如此周而复始,实现所有LED的动态显示。
该方法的原理利用了人眼对物体的视觉延迟来达到所有LED的同时显示,实际上,在每一个时刻,只有一组LED是处于显示的状态,而其他LED组均为关闭状态。理论上,若两次显示之间的时间间隔小于32ms时,人眼即无法分辨,因此,为了达到此要求,LED的扫描频率一般可按照下式计算得出:
f = 32 * N
式中,
f为扫描的频率,对应为定时器的定时时间(T=1/f);
32 则是由32ms换算而来,32ms对应的频率刚好为 32Hz;
N则是总的LED的组数(此例中为N=4)。
根据此式算出的扫描频率f实际上是LED 驱动扫描的最小频率,若低于此频率,则有可能导致LED的闪烁。当然,f也不可能越高越好,扫描的频率太高,相对而言,每一组LED的点亮的时间就越短,因此有可能导致LED的亮度不够或显示效果不理想等一些问题。当然提高LED的驱动电压也可以弥补由此造成的亮度不够的问题。
此例中,由公式可知其扫描的频率应大于等于128Hz,则较为理想。
2. MCU程序的实现:
a.模块的划分:
在说明其编程之前,先说明一下模块化编程思想在LED驱动设计中的应用。为了使程序的结构清晰和维护的便利,特别是为了使程序的移植等变得可行,在程序的设计过程中应尽可能地采用模块化的设计思想,对于复杂的程序结构和功能的实现,更应该在编程之前理顺其相互之间的关系,划分好各功能模块所应完成的功能,定义好各模块之间的数据接口和相互关系。
一般而言,显示部分所涉及到的内容和功能相对较广,比如按键的变化、系统状态的变化、数据的变化等均需在显示的结果上表现出来。因此,为了保证不同的模块之间的独立性,我们将与LED显示的有关的功能进行如下的划分:
1. 扫描驱动模块:此模块的功能只完成对所有LED的扫描,而不关心所显示的数据的具体变化情况,其从固定的显示缓冲其中提取每一扫描地址所对应的数据,该对应关系是固定的,由程序设计时来设定。该实现的方法类似与PC机中CRT的显示驱动和显示缓冲;
2.字符、点阵发生器:由于实际的数据与显示的数据(Pattern)之间并非是相同的,因此,需要将实际的数据转化成能够显示的数据。例如在MCU中的各种计算的数据是以BCD码或二进制码的形式来表示的,需要将其转化成7-段码或nxn点阵的Pattern数据进行显示;
3.显示缓冲刷新和处理模块:该模块的功能是接受诸如按键、系统状态变化、数据变化所引起的显示数据的变化。其需要调用到字符、点阵发生器来完成显示缓冲的刷新,其与按键、系统状态变化等之间的接口是采用消息的机制来实现。该模块一般需要根据不同的显示内容来进行分类,比如在跑步机的设计中,可以划分为如下的内容:距离、速度、时间、能量消耗、心率及其他相关的数据。

b.程序架构和实现
1.扫描模块的实现:由于LED的扫描驱动是一个重复的不间断的过程,自然,定时中断是最好的实现方法,其流程如图6所示,其中BuffPt用于指向当前的显示缓冲区,Ai则为当前所需显示的LED组的地址编号,从0到N(N为总的LED组数);
2.刷新模块的实现:在MCU的程序设计中,一般将此模块置于16Hz的定时中断中(若主程序的循环周期不固定且最大的循环时间大于1/10秒时,常采用此架构)或主程序循环体中(此种情况主要时针对MCU时钟比较高的场合或不需考虑显示延时的情况下),通过检测对应的消息来决定其是否需要执行数据的刷新。以跑步机的设计为例,其功能流程如图7所示;
3.字符、点阵发生器:由于在一些实际的应用中,可能的显示内容原则上是可预知的和有限的,特别是汉字的显示,因此其主要是通过定义相应的点阵来保存各种需要显示数据。为了便于程序的设计,一般需将其按照一定的排列规则来进行定义,同时也需要为各个需要显示的字符和图符进行编码,编码的规则必须有利于程序的设计和提高代码的效率,以求能够采用统一的查表指令来实现。

图6
注:上述的流程只是一个原理性的程序说明,在实际的应用中,需要根据MCU的特点及具体的硬件设计来进行程序的设计与简化。比如:在实际的项目中有8x8(或小于8x8)个LED需要驱动,而且所选的MCU又是8位或16位的,则此时的地址线的扫描将变得非常的简单,只要建立字节变量Ai,其初始值为0x01,然后在每次中断处理程序中需将Ai直接输出到LED扫描线所对应的IO口即可,随后将Ai左移一位,对8x8 LED情况,当Ai=0时,表示一遍扫描完成,此时再将Ai设为0x01即可。对于显示的缓冲区的分配,同样可以根据实际的软件设计来分配具体的RAM地址空间,以进一步提高程序的执行效率。记住,由于LED的扫描需要占用较多的MCU时间,因此在进行扫描驱动的程序设计时,需要尽可能采用简洁高效的代码,以便提高MCU的工作效率。举例来说,假如需驱动8x8 LED,根据前面所讲的要求,所需的定时器的中断频率必须是大于等于8x32,即256Hz,若在此驱动代码中多增加一条语句,则MCU每秒就需要多执行256条代码,由此可见高效的代码对于LED驱动程序来讲是多么重要,特别是当MCU的时钟不够快时!









评论