基于京微雅格CME-M7的智能机器人控制系统设计与实现
三、CME-M7硬件设计方案总成
本文引用地址:http://www.eepw.com.cn/article/268457.htm机器人总体构成
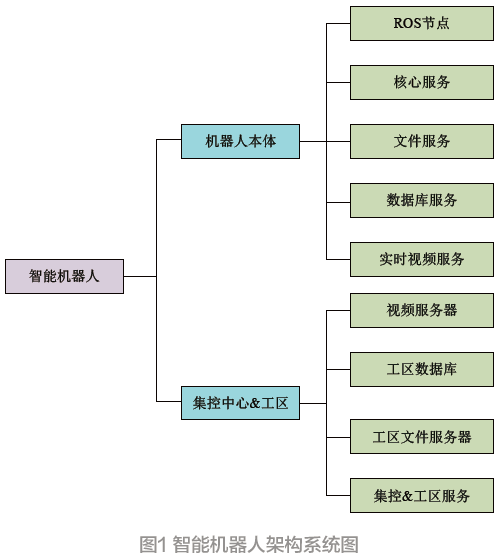
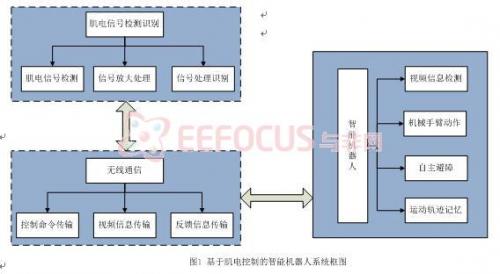
如图1所示,以CME-M7微处理器为核心,接受传感器传来外部信息,进行处理,控制机器人的运行。
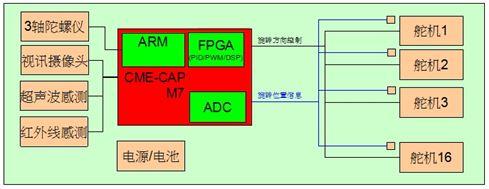
图1 机器人总体构成
人型机器人的整体规划
人形机器人是一种智能化机器人,在机器的各活动关节配置有多达16个服务器,具有16个自由度,特显灵活,更能完成诸如手臂后摆90度的高难度动作。它还配一套设计优良的控制系统,通过自身智能编程软件便能自动地完成整套动作。
系统电源供电部分
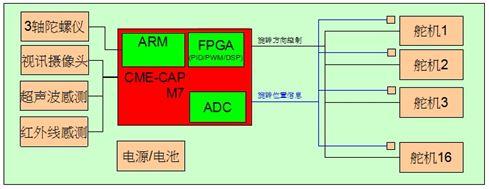
由于机器人电机,传感器及系统采用+5V供电,CPU采用core 1V & I/O 3.3V供电,电源部分均考须虑电机功率和整体质量及摩擦阻力问题,电源我们采用锂电池组串联与同步降压处理,功耗小、体积小和质量轻,安装较为方便。
电机驱动及PWM调速部分
机器人需控制在一个合适的速度运行,速度快,因MCU对各传感器传来的信号有一个响应、处理时间,小车极易偏离轨道,此时需要搭配FPGA电路来实现实时运算处理后再提供给MCU。伺服的速度是由直流电机转速控制,经由级联减速齿轮进行降速后得到旋转与更大扭力,改变伺服齿轮的控制角度通常采用调脉宽、调压、调磁等方式来实现。其中,调压方式原理简单,但需要模拟输出, 调脉宽方式需要FPGA逻辑搭成PWM控制模块,在CME-M7容易实现。
可以使用FPGA、模拟电路、单片机来产生舵机的控制信号,FPGA容易生成稳定且快速的脉宽调制信号的脉宽变换产生50Hz(周期是20ms)的信号,但须注意运放器件的选择有较高要求。
若只用单片机作为舵机的控制单元,使PWM信号的脉冲宽度实现微秒级的变化,从而提高舵机的转角精度。单片机完成控制算法,再将计算结果转化为 PWM信号输出到舵机,此时会因为单片机的指令周期不同与程序运行间隔不同而有不准确性,故采用CME-M7 FPGA PWM来直接控制,是一个数字系统,其控制信号的变化完全依靠硬件计数,所以受外界干扰较小,整个系统工作可靠,再由MCU下达参数给FPGA进行伺服的角度设置。

图示:舵机的控制要求
舵机是一种位置伺服的驱动器,适用于需要角度不断变化并可以保持的控制系统。舵机的控制信号是PWM信号,利用占空比的变化改变舵机的位置。
当控制信号由输入缆线进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转电路。当电机位置与定位器不一致时,电机驱动芯片的正反转电路输出正反转讯号驱动电机,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
舵机内安装了一个电位器(或其它角度传感器)检测输出轴转动角度,控制板根据电位器的信息能比较精确的控制和保持输出轴的角度。
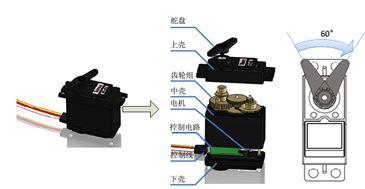
舵机的主体结构如下图所示,主要有几个部分:外壳、减速齿轮组、电机、电位器、控制电路。
简单的工作原理是控制电路接收信号源的控制信号,并驱动电机转动;齿轮组将电机的速度成大倍数缩小,并将电机的输出扭矩放大响应倍数,然后输出;电位器和齿轮组的末级一起转动,测量舵机轴转动角度;电路板检测并根据电位器判断舵机转动角度,然后控制舵机转动到目标角度或保持在目标角度。

舵机是一个微型的伺服控制系统,具体的控制原理可以用下图表示:
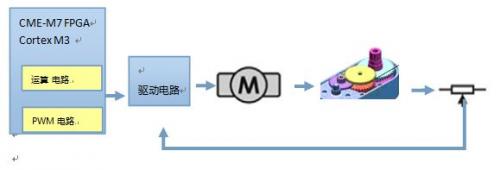
工作原理是控制电路接收信号源的控制脉冲,并驱动电机转动;齿轮组将电机的速度成大倍数缩小,并将电机的输出扭矩放大响应倍数,然后输出;电位器和齿轮组的末级一起转动,测量舵机轴转动角度;电路板检测并根据电位器判断舵机转动角度,然后控制舵机转动到目标角度或保持在目标角度。
舵机的控制脉冲周期20ms,脉宽从0.5ms-2.5ms,分别对应-90度到+90度的位置。如下图所示:

利用CME-M7高性能硬件实现机器人的动态平衡,三轴传感器获得的姿态资料经过的FPGA与DSP直接运算后,传递给PWM生成控制讯号,達成即時控制要求。






评论