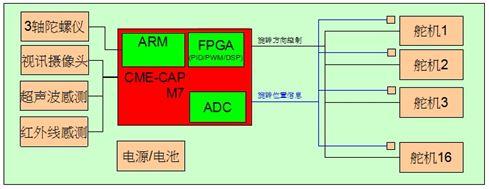
基于京微雅格CME-M7的智能机器人控制系统设计与实现
二、特性介绍与设计应用
本文引用地址:http://www.eepw.com.cn/article/268457.htm• 实现了高性能MCU内核与大容量FPGA的无缝结合
内含192K Bytes 高速SRAM与外扩DDR I/II/III内存,并透过PBUS总线在内部衔接MCU外设与FPGA,在信息或取与数据运算之间透过FPGA做实时快速处理,并接续到MCU的高速运算,达到及时的控制要求
• FPGA逻辑单元高达12K
200 MHz最大频率,高达11520个4输入查找表,7680个DFF寄存器,144个EMB5K(4.5Kbit可配置双端口DPRAM存储器),可以充分可重复编程硬件,大容量高速度与强大重新编程重新配置能力,有效缩短产品上市时间与功能修正
• 更高等级处理器
300 MHz最大频率,1.25 DMIPS/MHz(Dhrystone 2.1)性能,单周期乘法指令和硬件除法指令,2个AHB主/从总线接口,可以在线调试模式,支持串行线调试接口(SWD)和JTAG接口
支持嵌入式Trace Macrocell™,’采用哈佛结构,1.25DMIPS/MHz和0.19Mw/MHz,Thumb-2指令集以16位的代码密度带来了32位的性能,内置快速的终端控制器,中断间的延迟时间降到只需6个CPU周期,从低功耗模式唤醒的时间只需6个CPU周期,与ARM7TDMI®相比运行速度最多可快35%且代码最多可节省45%
• 2个12位1MSPS ADC模块
可充分应用于环境侦测,动作位置定位感知,搭配于FPGA的逻辑单元,可以实现不经由MCU即可达到硬件运算修正的要求,实现实时高速运算控制要求
• 丰富的I/O资源与封装,以硬核形式整合以太网、USB、CAN、DMA控制器以及DDR控制器等外设
可以同时支持超过80组伺服电机控制,远超过一般MCU的控制极限,让每单元都独立运作,透过以太网、USB、CAN、 PCI,PCI-X可以实现对不同模块的通讯,甚至连接计算机与网络都不是问题
• 高精度PLL 及时钟网络
4个PLL,支持倍频、分频、相移、de-skew,8个外部时钟输入,1个外部晶体时钟输入,16个de-skew全局时钟,高精度的高速时钟源可以让内部时钟可以达到300MHZ的稳定运算
• 灵活的乘加器实现DSP
嵌入式DSP ,- 48个18x18或 96个12x9 DSP(MAC),可以组合成浮点运算器,丰富的乘累加器多达32组,可以让运算更简捷迅速与精确,机器人控制再也不需要额外DSP芯片即可达成
• 基于Efuse和AES的保密机制
配置讯息的可加密,难破解,让使用者的科研开发成果得以保持优势,进而保持产品价值优势
• 超高系统性价比
基于高度整合于单一芯片,有性能高 体积小 价格低的持续优势
CME-M7产品可应用在机器人控制中所需的核心如工业控制机器人、安防监控机器人、和家居机器人等领域。让机器人工能在设计上变得更简单又强大。





评论