前馈控制在电梯驱动系统中的作用分析
编者按: 摘要:近年来,各大电梯厂家均在不断地加大对技术创新研究的投入,电梯系统的控制也随之出现很多新的应用技术。本文将介绍前馈控制技术的基础原理,以及对前馈控制在电梯驱动系统中的作用进行分析,并提出适合电梯运动特性的前馈系统。
背景
近年来,变频技术以及自动控制技术均已在电梯行业中得到了广泛的应用,而且越来越多的高端客户对电梯运行的性能要求也越来越高,因此,行业内处于领先水平的电梯企业都在电梯控制技术上不断地推出一些新的应用技术,并结合相应的产品推向市场。本文将介绍前馈控制技术的基础原理,以及对前
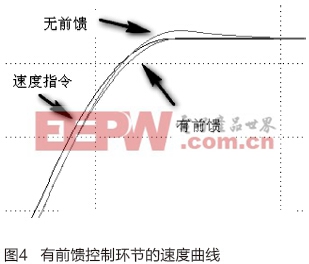
增加了前馈控制环节的速度曲线,系统超调现象明显减小,系统的响应性能明显得到提高,如图4所示。
1.3 前馈控制参数分析
前馈控制中有两个重要的参数,一是加速度指令,二是前馈增益的放大倍率,两者相乘就可以得到前馈力矩指令,如公式(1)所示。下面对这两个参数的影响进行分析。
1.3.1 加速度指令
将电梯的速度指令进行微分,就可以得到加速度指令。至于为什么要用加速度而不用速度,可以根据公式(2)得出其原因,当电梯载重不变时,电梯加速度跟力成正比,在主机绳轮直径不变的前提下,电梯加速度指令跟力矩指令成正比。因此,加速度的大小可以直接反映力矩的大小。
![]()
加速度指令前馈相当于力矩指令前馈,而系统的力矩指令能直接控制变频器的输出电流值,这样就有助于直接控制电机的稳定运行。
1.3.2 前馈增益
前馈增益是一个放大倍数,它将加速度放大,并使之变成力矩指令。由于电梯在匀速段时加速度为零,前馈力矩也为零,而在加减速段,前馈力矩的值必须要与真实需求的输出力矩相同,这样才能发挥出前馈控制在电梯运行中的性能优势。
加减速时的输出力矩大小与电梯系统惯量有直接关系,而每一台电梯的系统惯量都不一样。其系统惯量会受到包括提升高度、装饰重量、补偿率、电梯负载、旋转部件转动惯量等因素的影响。因此,我们必须通过对电梯系统惯量的自学习,来推算出真实需求的前馈增益,这种自学习的方式在不同的控制系统可以有不同的方法。
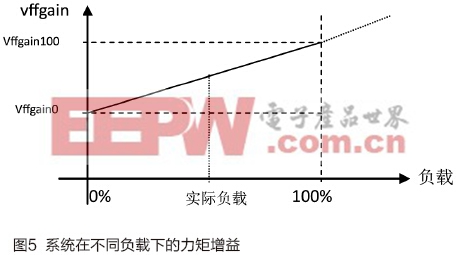
本系统的自学习功能,是自动计算系统减速运行与匀速运行时力矩指令之间的差值,并且由于电梯在0%负载与100%负载时的系统有效惯量差别大,因此,我们需要分别学习其在0%负载与100%负载时的力矩差值,以便系统自动计算其在不同负载下的力矩增益值。如图5所示。






评论