移动目标的微波探测技术

常用的微波探测器是借助微波多普勒效应探测布防区域内是否存在移动目标。探测器内的主要微波组件为微波传感器,其工作频率多选择在微波的S-波段,X-波 段,K-波段,常用微波传感器的技术构成分为平面微带型和波导谐振型。我们探讨微波传感的技术构成、频段选择对移动目标探测的影响,希望对探测器的选型和 使用有一定的帮助。
本文引用地址:https://www.eepw.com.cn/article/259822.htm微波是指频率在300MHz-300GHz范围内极高频电磁波,其波长范围从1m到1mm。微波具有直线(视距)传播,不受其他电磁波干扰,频带宽,系统 体积小等特点,首先在通信领域得到广泛应用。微波技术另一最重要应用当属雷达,使用微波雷达对远距离飞行目标测速,测距,测方位早在第二次世界大战中就已 成功应用。
随着微波半导体技术的规模化应用,微波技术的物理实现不仅十分简单、廉价,而且体积甚小,各种物体探测装置中都可以放进火柴盒大小的微波传感器,成为目标 探测装置中常见的组件。不同于红外探测器,这种微波组件对各种可以反射微波的物体都很敏感,且不受环境温度的影响,因此广泛用于工业、交通及民用装置中, 如车辆测速、液位测定、自动门、自动灯、自动盥洗、生产线物料探测、倒车雷达等。报警产品中微波探测器使用这种微波传感器组件,配合周边的电子器件,基于 多普勒效应的应用就构成了移动目标微波探测器,即多普勒雷达。
微波探测器所使用的多普勒雷达主要类型为连续波(CW)多普勒雷达。
1、多普勒效应
1.1、多普勒频移
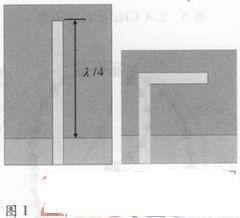
电磁波或声波频率因馈元本身或/和目标物相对运动所引起的频率改变称为多普勒频移,或称多普勒效应。站在月台听到进站火车汽笛声调变化的现象就是最好的多普勒效应体验。当火车迎你而来时,汽笛的频率会提高,声音变尖,反之亦然。
由多普勒效应得知,固定安装的雷达发出的固定频率微波,遇到静止物体产生的反射波其频率并不改变,遇到运动物体产生的反射波将会发生多普勒频移,频率的改变类似相对速度的计算,图1-1是多普勒频移的计算。
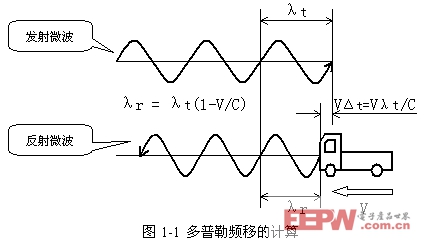
图中:V = 汽车行驶速度
C = 微波行进速度,300,000Km/S
λt = 发射波微波波长
λr = 反射波微波波长
1.2、多普勒信号和多普勒频率
多普勒雷达在发射微波信号的同时接受反射波信号,并将两者相混差频产生一个新的低频信号,称多普勒信号,其频率称为多普勒频率,是发射频率和反射频率之差。
多普勒频率 = |发射频率 – 反射频率| = |1/λt - 1/λr| = |ft - fr|
报警器多普勒雷达如果检测到多普勒信号则判定有移动目标存在。
针对不同的使用场合,可以选用不同频段的多普勒雷达,常用报警器产品的多普勒雷达工作频率选择在X-频段(10.525GHz),随着技术进步,最新的产品其多普勒雷达开始使用更高频段的K-波段频率(24.125GHz)。对于这两个频段,如果目标移动速度不超过百公里,多普勒频率的变化范围是 0-5000Hz。在此范围内多普勒频率和目标移动速度大体呈线性关系。下面是K-波段(24.125GHz)和X-波段(10.525GHz)多普勒频率与目标速度关系图。
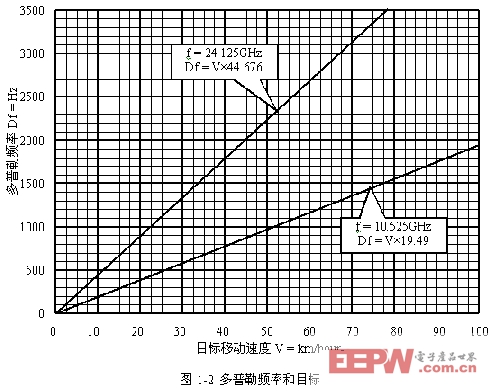
从图中可以看出,对于同一运动目标,K-波段多普勒频率是X-波段的2.3倍,这对于探测运动速度低于两公里的目标十分有利。S-波段的雷达由于波长超过10CM,对于较小运动目标不产生多普勒信号,适合需要防止诸如鼠类引起误报的场合使用。
2、连续波(CW)多普勒雷达
多普勒雷达有多种类型,其中脉冲多普勒雷达,调频连续波多普勒雷达不但可以测出目标的速度、距离、方位,甚至能够同时跟踪、区分出多个目标的移动情况,这些雷达需要配合精密的伺服系统和后处理技术,系统复杂造价高,多用于军事、航空、工业检测等领域。
报警器采用的连续波多普勒雷达,只能测到目标的移动速度,不能测到目标距离和方位。这种雷达构成简单,造价低廉,适合大规模推广使用。从技术构成来看,多数产品使用的是经济型平面微带多普勒雷达,较好的产品则使用专业级波导谐振多普勒雷达。
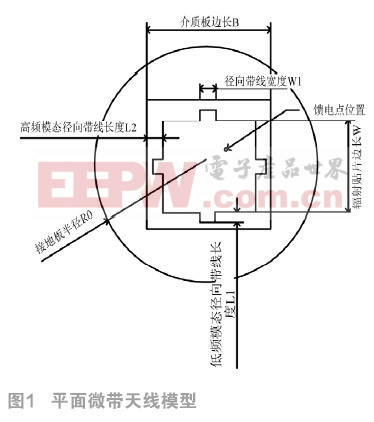
3、平面微带介质谐振多普勒雷达(平面微带雷达)
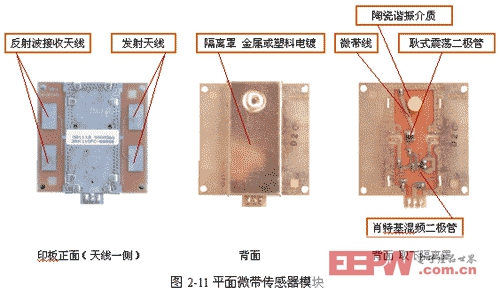
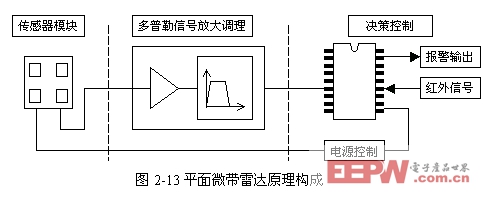
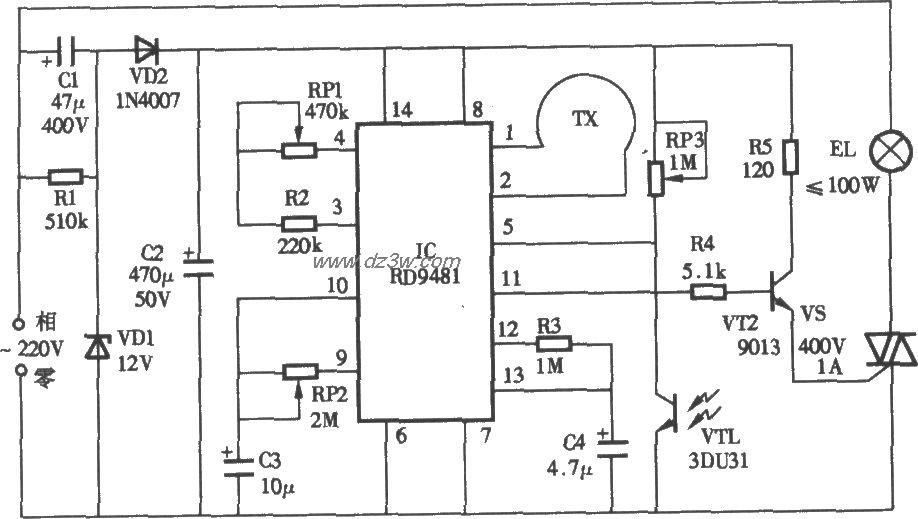
报警器使用的平面微带雷达生产成本低廉,勿需昂贵的检测加工手段,适合装配经济型报警探头。微带雷达由三部分组成,传感器模块,多普勒信号调理电路,决策控制部分,见图2-13。
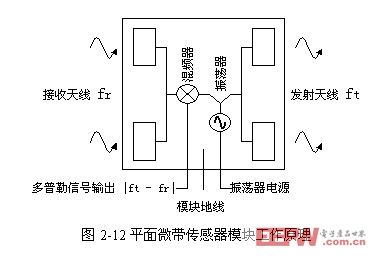
图2-11是平面微带传感器模块结构照片,图2-12是模块的工作原理图,图2-13是微带雷达的原理构成。
3.1、平面微带雷达的微波场强分布
平面微带传感器天线设计的简易性使得微波场强分布很难规则,安装使用这一类型的探头应给予特别的注意,尽可能避免误报、漏报。
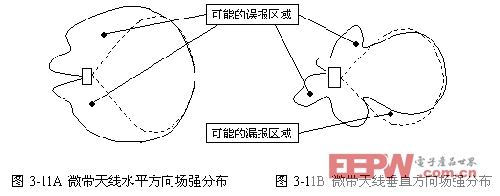
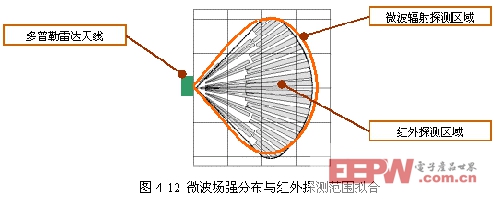
对于双鉴探头而言,我们希望微波探测范围与红外探测范围尽可能吻合,图3-11A实线区域是微带天线水平方向场强分布,图3-11B实线区域是微带天线垂 直方向场强分布。显而易见微波的场强分布与红外探测区域(虚线)有较大出入,由此形成了微波探测可能的误报区域和漏报区域。
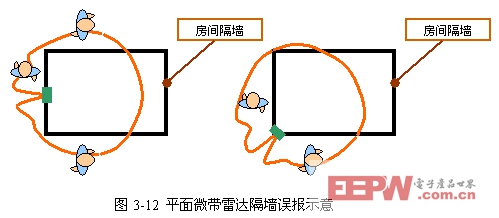
微波对建筑物墙体有穿透能力,泄漏到墙外的微波对设防区域以外的移动目标发生作用时,可能造成隔墙误报,安装这类探头时应认真选择安装位置,避免误报。图3-12是隔墙误报的示意。
3.2、多普勒信号的处理
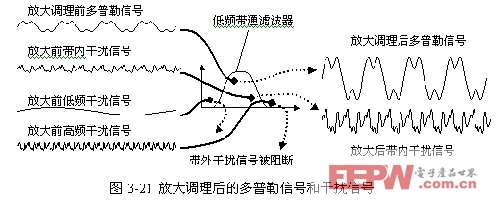
微波传感器模块输出的多普勒信号十分微弱,需要放大数千倍才能做进一步的处理。此外,放大的同时还必须使信号通过一个低频带通滤波器,目的是去掉高频和甚低频干扰。
图3-21示出多普勒信号、带内干扰信号、高频干扰信号、低频干扰信号通过带通滤波器前后的情况。可以看到,高、低频干扰信号受带通滤波器的阻隔不能通 过,但放大多普勒信号的同时,频率落在带内的干扰信号也被放大通过。为了分离有用的多普勒信号,决策控制部分通常会加入自适应门限控制算法来切除漏过带通 滤波器的干扰信号,这种算法是通过分析信号幅度的大小来区分多普勒信号和干扰信号的。显然,当多普勒信号的幅度不敌干扰信号时,就无法探测到运动目标了。
多普勒信号中干扰成分源自几种可能:
电源及热电噪音干扰。可以换用低噪元件加以改善,成本因此增加。
振荡器谐波混频干扰。振荡器品质因素(Q值)不好,会产生较强谐波成分,如果发射天线不做抑制,这些谐波成分相互混频,会在低频段产生虚假多普勒信号。平 面微带雷达采用压电陶瓷作为谐振介质,因陶瓷介质对电磁波造成损耗,其Q值不及波导谐振腔振荡器。为了抑制虚假多普勒信号,配合平面微带传感器的工作,低 通滤波器低端截止频率会取得高一些,有可能造成缓慢移动目标的漏报。
设防区域存在规则运动物体(如吊扇)造成的干扰。通常的门限算法对信号的幅值分析很难排除这样的干扰,一种做法是对多普勒信号做进一步的频域分析将干扰区分开来。
另外,正因为平面微带雷达固有干扰较大,较远回波不能测到,探测距离受到限制。
4、波导谐振多普勒雷达(波导谐振雷达)
波导谐振雷达的原理构成与平面微带雷达相同,但传感器、信号调理、决策控制等部件的技术设计有较大区别。
4.1、波导谐振传感器
报警器使用的传感器属微功率微波部件,通常采用一体化结构,包含振荡器、发射天线、接收天线、混频器等四部分组成(参考图2-12)。
作为微功率雷达馈源的核心,微波振荡器多采用耿式振荡器。利用砷化镓耿式二极管在低压电场下的负阻效应,很容易构成将直流电流转换为微波段交变信号的振荡 器。这种震荡器的微波输出功率可以做到从几毫瓦到百毫瓦。实用中,数毫瓦的微波功率足可以使探测器的探测距离达十数米,这样微弱的电磁辐射对人和物体不会 造成任何伤害,但在文博行业更愿意使用超声雷达,以避免微波对文物微剂量持续辐射造成可能的积累作用伤害文物。
如果不加约束,耿式二极管工作于脉冲自由震荡方式。为了获得良好的震荡参数,如频率、频率稳定性、功率稳定性、Q值(震荡的简谐性),要对振荡源周边部件做良好设计,特别是谐振体的技术设计至关重要。可以选用的耿式振荡器谐振方式有三种类型。
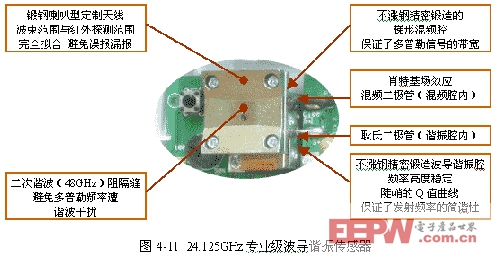
波导谐振型(Waveguide),谐振体是金属空腔,腔体尺寸与微波波长相关。波导谐振腔振荡器是各种振荡器中技术指标最理想的。这种波导类型的谐振腔、天线等零件需要用不胀钢精密锻造,再配以镜面碾压工艺,生产、检测成本很高,需要专业厂商提供。
同轴谐振型(Coaxial),仍然是谐振腔型,但加工工艺会简单些,技术指标较波导谐振型略逊一筹,在报警探测器中未见采用。
平面微带型(Planar Microstrip),设计原则是低成本条件下的适用性,这类模块的生产成本不到波导谐振型模块的1/40-1/60,但可以满足使用要求不高的场合。 平面微带型谐振体是圆柱形压电陶瓷,陶瓷的介质损耗限制了震荡源的技术指标。印板工艺蚀刻的铜箔天线平面排布,电磁波的场强分布很难控制(图3-11)。 注意到个别产品将四片蝶型排布的天线化整为零,数百片微小铜箔排列成阵,规则相连,利用传输线延迟产生相控效应,来约束场强分布,但实效不大。
图4-11是一种双鉴探测器中使用的24.125GHz专业级波导谐振传感器。图4-12是该传感器场强分布,可以看出与红外探测范围近乎拟合。
4.2、缓慢移动目标的探测
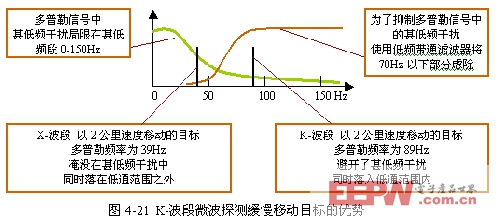
从图1-2中看出K-波段多普勒频率是X-波段的2.3倍,为什么提高微波频率有利于探测缓慢移动目标,图4-21用频域分析图示了其中的原因。
4.3、多普勒信号的频域分析
使用波导谐振模块所获得的多普勒信号信噪比高,经过放大调理后的多普勒信号其干扰成分较其他类型传感器明显减少,这样的信号送往决策控制部分不仅可以做更 好的自适应幅值控制,提高探测灵敏度,延伸探测距离,还可以对信号做进一步的频域分析,了解移动目标深层次属性,帮助排除现场规则运动物体造成的虚假警 情。
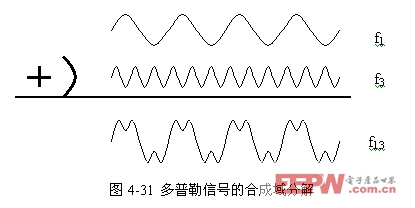
图4-31将频率为f1和 f3 的两个正弦信号做线性叠加,产生了一个非正弦信号 f13 。由此逆推,图3-21中所获得的多普勒信号实际上是由 f1 和 f3 组成的,换言之,我们同时探测到了两个移动的目标,并且,其中一个目标移动的速度是另一个目标的3倍,这就看出频域分析的优势。
实用中可以采用快速富里叶变换专用DSP芯片来完成这一时域到频域的变换。在探测器中可以更为简单地采用锁相环综合器技术实现这一转换,类似彩电自动搜索 频道那样将视缆中“单一模拟信号”的所有频点找出来,将看似单一的多普勒信号的复杂组成描绘成频谱,为进一步的分析奠定基础。具体做法就是在决策控制器中 固化一个锁向环综合器算法,承担多普勒信号的频域转换,并不断地刷新这个频谱分布,再将获得的数据与固有的经验数据资料比对,对移动目标作出正确的判断。
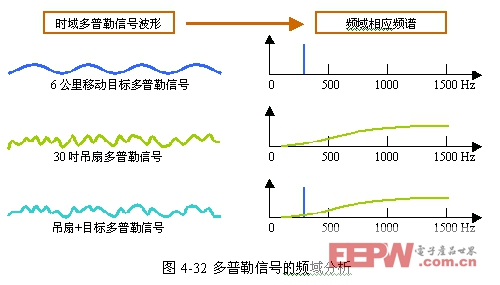
图4-32是目标、吊扇、目标加吊扇三种情况的多普勒信号波形(左边)及相应的频谱(右边)。
图4-23中,通过比较,在时域(左边),借助信号幅度的大小来区分吊扇和吊扇加目标的复合信号是不容易的,但在频域(右边)则很容易将两者区分开来。
以上我们较为深入地探讨了微波探测器的工作原理、技术构成、工作频率等,现在我们了解到,在要求各不相同工程实践中,正确选择类型、波段适用的微波探测器至关重要,同时要做到恰当安装微波探测器,才能确保整个工程达到既定的技术指标。
混频器相关文章:混频器原理 锁相环相关文章:锁相环原理 燃气报警器相关文章:燃气报警器原理

评论