行人视频检测中阴影检测与去除方法设计

视频图像中的阴影会影响行人的检测与跟踪[2-4],因为阴影的存在会造成检测目标的变形、合并、甚至丢失,使得目标定位及计数不准确。近年来,科研工作者对图像中的阴影去除问题进行了大量研究,在这些研究方法中,考察的图像特征主要有三种:光谱特征、空间特征和时间特征[5]。光谱特征针对像素点,如灰度值、颜色信息等[6],根据当前图与背景图的色差、亮度差值等判断像素点是否为阴影,或者对图像进行变换得到光照无关图[7]进而去除阴影;空间特征是针对某一区域或某一帧图像,根据检测到的图像的轮廓、纹理、边缘等信息判断是否为阴影,如利用图像的轮廓特征[8-9],找到目标与阴影的边界线,对本体和阴影粗分,再建立阴影像素的高斯模板进行细分,既减少了计算量又能达到较好效果;时间特征一般都是与前两种特征结合使用,可以用于对阴影方向或运动速度的估算等,以进一步提高阴影去除效果。
本文提出一种新的基于YUV颜色空间的阴影去除算法,因为很多摄像头的输出信号采用YUV颜色空间,与基于RGB颜色空间的处理方法相比,省去了图像颜色空间转换的步骤,能提高处理速度。在图像特征上,本文结合像素点的光谱特征与图像整体的空间特征,首先通过亮度差和色差对像素点进行判断,再利用目标本体与阴影只相接不相交的空间特征,对去除结果进行修正,使其阴影去除效果更好。同时,为了使算法适应光照、场景等的变化,采用模糊神经网络进行目标本体与阴影的分类,用遗传算法对网络参数和权值进行自适应调整,以提高算法的鲁棒性。
1 YUV颜色空间
在色彩学上,为了可以准确定量地描述颜色,将色彩定义为三大属性:“Y”表示明亮度,即灰度值;“U”和“V”表示色度,作用是描述图像色彩及饱和度,用于指定像素的颜色。根据美国国家电视制式委员会NTSC制式的标准,白光的亮度用Y来表示,色差U、V由B-Y、R-Y按不同比例压缩而成,与红、绿、蓝三色光的关系可用式(1)描述,这也是常用的转换公式。YUV到RGB的转换公式则如式(2)所示。
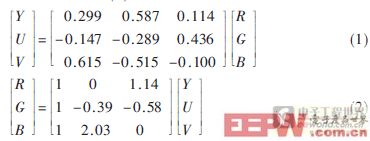
式中,R、G、B的取值范围均为0~255。通常摄像机的数据以RGB、YUV或YCrCb的格式输出。采用YUV颜色空间的重要性是它的亮度信号Y和色度信号U、V是分离的。目前有很多种颜色空间可以将图像的色度分量和亮度分量区分开来,如HSV颜色空间,但是这种转换较为复杂,对于大型图像非常耗时,并且在亮度值和饱和度较低的情况下,采用HSV颜色空间计算出来的H分量是不可靠的。
在YUV颜色空间中,如果只有Y信号分量而没有U、V信号分量,则这样表示的图像就是黑白灰度图像。除去亮度信号后,由U和V单纯表现出色度。因此,如果要将U与V色差信号用色相及饱和度来表示,必须从含有三维空间的色点P投影到U-V平面的P′点,如图1(a)所示。U-V平面投影法在受到不稳定光源亮度的扰动时,对于目标色度有较大的精确性且不易辨识错误,但是当光源色温变化过大时,其饱和度和色相的增减变化不易掌握。因此,如果需要判定两个任意色点是否为同一色度时,必须确定其色相与饱和度都是相等的。如图1(b)所示,对两个色点P1与P2,当其与U轴的夹角α1=α2时,表示色相相等;当其与原点的距离L1=L2时,表示饱和度相等。当两者都相等时,表示色度完全相同。
对于光源亮度的不稳定因素,只要光源亮度不是极值(极亮或极暗),对于相似颜色,如深蓝色和蓝色,就有相近的色度关系。对运动目标本体和阴影,也有相近的色度,但亮度值差别较大,可通过计算当前图与背景图之间的亮度差值和色差来进行阴影去除。


评论