利用差分霍尔器件实现齿轮速度测量

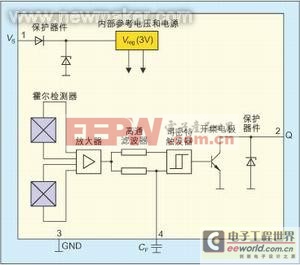
英飞凌科技在TLE 4921-3U上集成了两个霍尔传感器、一个差分放大器以及评估电路,该器件只评估场强差异值,而不是绝对的场强值,这意味着温度漂移、制造容差和磁场环境等因素对测量结果的影响可以降到最低。如果采用一个带外部电容的高带通滤波器对测量信号进行动态处理,将可进一步减小干扰影响。
该器件目的是在恶劣的汽车环境中应用。一个小的永久偏磁体需要用来感应各种形状的铁磁齿轮,正确的切换能确保检测出轮齿和齿隙之间的最小场强差异。对于一个470nF的滤波电容来说,典型的较低切换频率大约为10Hz。TLE 4921-3U器件的封装厚度为1毫米,只有四个引脚。
功能设计
当该霍尔器件处在任何极性的恒定磁场中时,其上的两个霍尔传感器将产生同样的输出信号。无论该磁场的绝对强度有多大,它们之间的差值总为零。然而,由于一个单元面向磁场集中的轮齿,另一个单元则面向一个齿隙,如果两个霍尔单元之间存在磁场梯度,那么将产生一个差值信号,并在芯片上放大。实际上,这个差值体现了一个小偏移,它可由相应集成的控制机制来修正。这种动态差分原理使传感器表面与齿轮之间存在较大气隙的条件下能保持高灵敏度。
如图1所示,一个施密特触发器用来对该信号进行数字化,一个开集电极输出电路提供输出信号。芯片上还集成了过压保护、反极性保护和抗电磁干扰功能,因而可以应用在汽车中常见的恶劣环境。
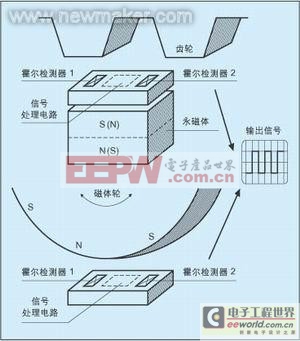
对于差值信号的生成和评估,这里可以一个感应铁磁齿轮这样的典型应用来解释。安装在器件背面任何一端的一个永久磁体产生一个恒定的偏置磁场,器件内的两个霍尔传感器相隔2.5毫米。如果一个传感器暂时面对一个轮齿而另一个面对齿隙,那么该轮齿将作为一个磁通量聚集器,它通过该霍尔传感器增加了磁通密度,由此产生一个差分信号。随着齿轮的转动,该差分信号的极性将改变,改变的速度同轮齿与齿隙之间变换的速度一样。
当过零点直接出现在该轮齿或齿隙的中心时,该轮齿的边缘就会产生最大的差值。当该差值超过上限阈值时,TLE 4921-3U的输出晶体管将关断。这就是图2中靠近管脚4的霍尔传感器2感应到该轮齿的情况。随着差值降到下限阈值,晶体管打开,这就是靠近管脚1的霍尔传感器1感应到轮齿。
齿轮、感应距离和角精度
一个齿轮可由其模数来表征:m=d/z。其中d是齿径,z是轮齿数量。轮齿到轮齿的距离为T,齿距的计算公式为T=π×m。
当一个霍尔传感器面对一个轮齿而另一个霍尔传感器面对一个齿隙时,感应到的差值最大。该器件内两个霍尔传感器的间隔为2.5毫米,在模数为1,对应的齿距为3.14毫米的条件下,该器件都可以感应到差值。如果该模数大于3或者齿轮不规则,将可能在一段较长时间内检测不到足够的差值,这意味着输出信号将不确定。
传感器和齿轮之间允许的最大距离是温度、模数、磁体和速度的一个函数,速度可以用每次轮齿/齿隙转变时在输出端出现一个脉冲来表征。
如果减小距离,将产生较大的有用信号。因此,切换精度可以随传感器低/高转变次数的增加而增加,这种低/高转变可以代表齿轮的一个旋转角度。
滤波器电容
滤波器电容在该霍尔器件的修正功能中起重要作用。如果一个应用需要工作在100摄氏度以上的温度条件下,建议采用陶瓷电容(X7R)。滤波电容引脚和GND管脚之间的连接线要尽可能短。在滤波电容引脚处的漏电流将引起切换阈值的漂移以及误切换。切换阈值的漂移可以按下式计算:
抑制供电线路瞬态干扰
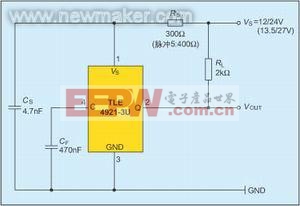
图3所示为采用TLE 4921-3U的测量电路。滤波电容CF(470nF)直接连到管脚4,另外在供电线路上加一个旁路电容(CS=4.7nF),并采用一个300Ω的串联电阻(测试脉冲5采用400Ω电阻)。某些应用不允许这样高的串联电阻,因为会引起供电电压下降。如果采用50到150Ω的较小串联电阻,那么几乎不会对下面的结果产生影响,仅对脉冲5会有些影响。由于其长达400ms的持续时间,这种所谓的负载突降(load-dump)脉冲会使TLE 4921-3U器件产生很高的功耗。如果没有一个足够大的串联电阻,该器件也许会损坏。因此,最小的电阻必须适应有关应用的负载突降需求,反之亦然。另一种可供选择的方法是在供电线路上加一个抑制二极管,这样就不必采用大串联电阻。
这个测试在一个TEM单元内进行,安装有霍尔传感器的印刷电路板进行了优化。从测量结果可以看出在整个频率范围内,在高达160V/m的磁场内TLE 4921-3U的工作不受到影响。
为优化TLE 4921-3U的EMI性能,首先要考虑印刷电路板的布局。下面的推荐依据的是内部测试该器件时获得的EMI测量结果。
元件参数值
CF=470nF 高通滤波电容
CS=4.7nF 可选的高频旁路电容
R P =0~330Ω 与CP形成电源线上的低通滤波器
CP=4.7nF 防止电导耦合和快速干扰脉冲
R q =33Ω 与Cq用来平滑信号的下降沿
Cq=4.7nF
RL=330Ω 负载电阻
以下是降低辐射干扰的优化措施:
1.接地(GND):电路板上的基准点是霍尔器件的GND管脚。为了避免传导干扰,到GND管脚的所有连线应该形成星形连接,否则抗干扰电磁的性能将会下降。
2.滤波电容的连接:滤波电容CF和GND管脚之间的连线要尽可能短(最理想的情况是CF的位置紧靠该霍尔器件),而且要考虑到上面所提的到GND管脚的星形连接结构。否则,建议在CF和TLE 4921-3U之间采用第二个较小的电容(例如82nF),其目的是缩短在CF和各对应管脚之间的连线。这个措施仅适用于该霍尔器件附近只有很少可用空间的情况。
3.接地屏蔽:建议将该滤波电容的GND连线延伸出去,作为该电容到C管脚连接的一个接地屏蔽。
4.附加的RF旁路:RF旁路电容CS能够进一步提高抗电磁干扰性能。
上面列举的优化步骤的效果(其重要性依次下降)会根据系统的具体特征(传感器、电缆和控制单元)而变化,并不是所有这些措施都需要采用,要根据具体的应用要求来定。
探测旋转速度
轮齿传感器的输出信号是矩形波,开关状态的每次改变代表从轮齿到齿隙的一次变换。对于矩形轮齿(例如模数2)和1到2毫米的感应距离来说,信号的占空比几乎为1:1。速度信息的形式取决于具体的应用,可能为数字形式,也可能为模拟电压形式。
1. 模拟评估
速度控制是传统控制工程中最常见的任务。模拟控制器(比例、比例积分和比例积分微分)针对的受控变量是正比于速度的电压。获得这个正比于速度的电压的第一步就是传感器输出信号通过一个单稳态的边沿触发器转换成一个方波信号,其“开”时间固定,“关”时间可变(取决于速度)。第二步是进行线性平均,采用一个转换系数使它正比于速度。
一个运动线圈仪表特别适合于速度的模拟显示,这在较低的截止频率(一般为10Hz)情况下它是一个理想的平均器。
2. 数字评估
如果正比于速度的电压以数字形式生成,或者相关的系统中有一个微计算机可作为数字控制器,那么该速度很容易计算出来。
将齿轮传感器连接到一个微控制器的计数输入端(例如,8051单片机上计数器0的外部输












评论