MIMO-GMC链路自适应方法及其DSP实现

0 引言
B3G(后第三代移动通信系统)追求高效的频谱利用率和灵活的功率分配,而单天线系统的香农限决定了传统的技术无法达到B3G的高传输速率,所以多天线技术的应用成为必然的趋势[1]。但与单天线系统相比,多天线无线通信系统的信道环境更为复杂,移动终端在经历不同的场所、以不同的速率移动时,与基站之间的信道可能历经不同的类型,其容量随之有较大的变化。为适应信道的变化,采用适用于各种环境的统一的信道自适应传输方法,将具有更大的潜力。
在被提出的众多链路自适应方法中,有最优功率分配[2]、自适应调制[3-5]和波束成形[6-7]等,但是单独应用某一种方法,存在一定的局限性。本文联合运用统计空间注水、自适应流控制、自适应调制以及线性预编码等[8]多种链路自适应传输方法,以获得更高的增益。
在链路自适应算法的实现中,最为复杂的是信道自相关阵的特征分解,通常一般的求逆法无法做到实时处理,而且忽略信道自相关阵的Hermite特性而进行奇异值分解也是低效率的做法。本文考虑到自相关阵的共轭对称特性,在。Householder三对角化后再用QR(正交矩阵一上三角矩阵)隐位移迭代法处理[9]得到结果。这比Jacobi旋转法等有更快的收敛速度。
1 链路自适应算法
对于离散MIMO(多输人多输出)基带系统,接收信号可表示为:![]()
式中:k为子载波号;ι为采样时间;p为传输路径号;y(k)为接收端收到的NR×1接收向量;Hp(k)为第p条路径上的NR×NT信道矩阵;x(k)为发送端发送的NT×1发送向量;z(K)为相应的NR×1噪声向量;NT和NR分别为发送天线数和接收天线数。
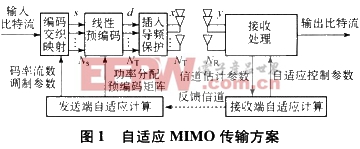
图1中体现了自适应链路控制过程。接收端通过信道估计获得信道统计信息,然后对得到的信道统计信息进行量化和编码,通过反馈信道传送至发送端。发送端利用信道统计信息计算出链路自适应参数,并用于控制编码调制和计算发送预编码阵,发送端采用特征模式传输和随机虚空选择发送方式,同时,接收端采用相同的链路自适应控制参数进行自适应接收。
要获得信道的特征模式,首先要根据信道估计的信道冲击响应Hp(k)计算发送和接收的自相关矩阵RT(t)和RR(t):

式中:t为第t帧反馈;β为跟踪相关信道的时变权重;上标H代表共轭转置。
信道统计参数是缓慢变化的,RT(t)和RR(t)用一阶IIR(无限冲击响应)滤波器来滤波,并假设多载波之间的统计特性相同,对其平均以平滑统计噪声。RT(t)和RR(t)具有Hemite特性,对其进行特征分解:
式中:UT(t)和UR(t)分别为发送和接收自相关阵的特征矢量阵;
特征值也可以称为信道特征值,按从大到小的顺序排列,UT(t)的列向量则定义了信道的特征方向。
用统计空问注水法在每个特征值方向分配适当的功率以提高功率效率。信道的注水解可表示为:![]()
式中:ε为门限,是取决于发送功率的常数。
流控制是自适应控制的重要一环,接收机通过对信道的统计特性进行分析,综合考虑MIMO的发送和接收相关性及直达路径等因素,从能量的观点出发,确定实际可传输的流的个数Ns当然,Ns还必须不大于功率分配中非零解的个数。
决定在当时的MIMO信道条件下可能的数据传输速率不但需要流控制信息,还需要估算信道容量的理论上界,并根据接收机实现复杂度等条件对信道容量进行一定的修正。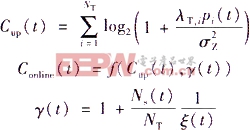
式中:ξ(t)为匹配滤波器的输出信干比f(·,·)为容量的调整函数,在不超过Conline(t)的总发送数据比特的约束下,每个流上遍历选择即可得到相应的调制参数。
接收端需向发送端反馈发送自相关阵、噪声方差、自适应流的个数和每个流上的调制方式。为了减少在反馈链路上传送的数据量,发送相关阵用差分量化传输:
为了进一步保证传输可靠性,可以在允许的条件下对△RT(t)编码。
发送端得到自适应参数后,发送数据信号生成如下:
式中:P(t)=diag{pT,1(t),pT,2(t),…pT,N(t)}为功率注水矩阵;W为Walsh扩频矩阵; 为当前帧的发送成形矩阵(预编码矩阵);V(k,ι)为NT×NR选择矩阵;V(k,ι)随机从ζ={Vi;i=0,l,
为当前帧的发送成形矩阵(预编码矩阵);V(k,ι)为NT×NR选择矩阵;V(k,ι)随机从ζ={Vi;i=0,l, 中选择;s(k,ι)为发送符号。
中选择;s(k,ι)为发送符号。
2 特征分解和预编码阵的求逆运算
收、发自相关阵的特征分解处理是运算量很大的过程,必须选择恰当的方法,保证计算延时控制在一定的范围内。在自适应的DSP实现中,采用复数阵扩展法将自相关阵转化为实数阵[9],以增加部分计算量为代价,避免了繁琐的复数运算,可提高DSP工作效率。同时,充分考虑了相关阵的HermitE特性,对称的特性意味着操作上三角或下三角矩阵就可达到操作整个矩阵的目的。对转化后的实对称阵用Householder法约化得到三对角阵,然后用QR隐位移法分解成特征值和特征向量。对求得的特征值和特征向量排序也是必须的,最后用实数分解结果重建复数阵的分解结果。其中,隐位移QR算法是一个迭代的过程,非对角元的大小门限、最大容许迭代次数与分解精度、处理延时密切相关,这些可以根据系统要求灵活调整。
链路自适应对发送信号进行线性预编码处理,在接收机解码处理时需要得到预编码阵的逆阵。在实际系统中要加上矩阵的一般求逆将是无法容忍的。针对线性预编码阵UT(t)P1/2(t)W中UT(t)和W都是酉矩阵,且P1/2(t)是对角阵,即用UT(t)P1/2(t)W)-1=WH(P1/2(t))-1(UT(t))H表示即可。这样只要用较少的计算就可以得到预编码阵的逆阵。
3 链路自适应系统设计
东南大学研发的B3G试验系统上行链路采用了该算法。该系统载波频率为3.5 GHz,将20 MHz带宽分成若干个宽为1.28 MHz的子载波,频带中间的12个子载波用于数据传输,边带的子载波用做保护带,多载波的处理由多载波滤波器组完成。上行链路采用4发8收的结构,调制方式从QPSK和16QAM中选择,自适应支持12.5 Mbit/s~100 Mbit/s之间均匀的共8挡传输速率,自适应模式共有14种。
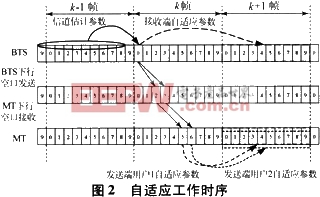
图2所示为自适应工作时序,包括两个高速用户,当基站侧在第K帧时,取得第K-2帧的9号时隙和第K-1帧的0~8号时隙的信道估计参数,通过这些参数更新信道统计信息,进行自适应计算。而计算得到的直接自适应参数用于第K+1帧的O~9号时隙的迭代干扰抵消和解码。同时,基站侧将统计信息和部分自适应控制参数分成用户1和用户2的两个部分,分别组人下行链路的空口2号和3号子时隙位置的控制数据部分,发送至移动台。移动台侧根据反馈的数据重建信道统计信息并重复部分接收端的计算过程,得到与接收端完全一致的自适应控制参数,用于控制第K+1帧O~9号时隙的数据发送。
基站链路自适应处理流程如图3所示。
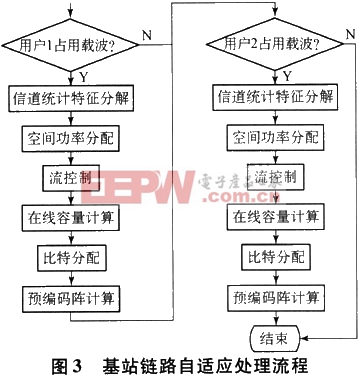
链路自适应处理都在基站侧完成,但是为了高效利用反馈链路,不可能直接把线性预编码阵反馈到移动台侧。而反馈信道发送自相关阵的增量,并在移动台侧恢复信道发送自相关阵后特征分解求线性预编码阵,可大大减小反馈的数据量,此方法有更大的优势。接收端自适应处理反映了详尽的自适应计算过程。
4 仿真和实验结果
试验系统载频工作在3.5 GHz,上行链路采用4发8收。帧长为8.375 ms,并把一帧划分为10个等长的时隙。仿真中采用了4发4收和4发8收,收发天线相关因子相同,分别是0和0.5,车速为5 km/h和120 km/h,信道模型为6径的Cost207,编码方式为l/2Turbo码,每个采样点为500帧的平均结果。
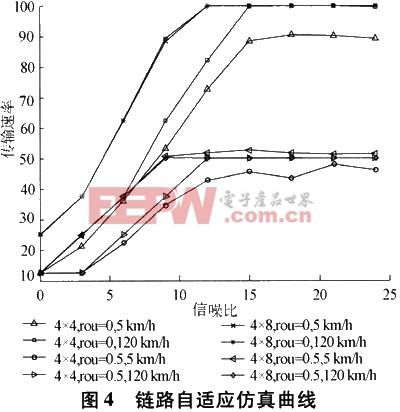
图4是仿真曲线。由图中可知,4收和8收有3 dB的差异。天线问的相关性直接影响信道独立流的个数,从而使高相关性的信道极大地降低了传输速率。5 km/s和120 knv/s的车速凸现了慢衰落和快衰落下的系统性能差异,在低车速下即使高信噪比仍然无法达到最高的传输速率。
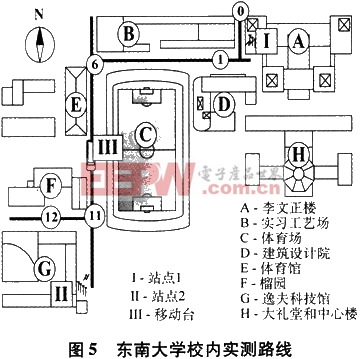
图5是实际外场测试路线及场景图。移动台首先静止在1号点,然后从1~12号点顺序遍历,在12号点掉头原路返回,最后在0号点停止。
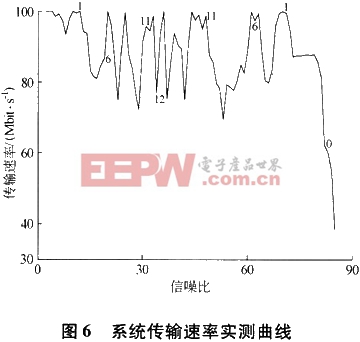
图6显示了共85组实测数据,每组是500帧结果的平均。
5 结束语
仿真表明,该自适应算法能够在大动态范围内的信道变化下自适应调节系统传输速率,保证系统高效、稳定、可靠地工作。该自适应算法的DSP实现满足实时性要求,外场实测结果是试验系统能在测试环境中正常运行,可以达到100 Mbit/s的峰值传输速率。





评论