基于QTE的ARMDSP嵌入式系统的直流电机监控界面的设计与实现

摘要:以嵌入式微处理器ARMDSP主从控制模式下设计直流电机控制系统,重点介绍基于QT/Embedded设计的直流电机监控系统界面,包括串口通讯和电机控制。搭建基于嵌入式操作系统Linux的开发环境,采用C++语言进行应用程序界面的开发,根据基于串口的应用层协议,实现主从控制器间的数据通信。并完成Linux操作系统的移植,通过触摸屏实现人机交互。
关键词:S3C2440;TMS320F2812:Linux;QT/Embedded;直流电机;图形化用户界面
0 引言
嵌入式技术在机器人控制领域应用广泛,它集中了机械工程、自动化控制以及人工智能等多门学科的最新科研成果,已经成为当前科技研究和应用的焦点与重心。而机器人控制系统需要解决的关键问题之一就是电机控制技术。本课题基于嵌入式系统处理器ARMDSP主从控制模式的硬件平台,利用Linux操作系统,对直流电机的控制进行研究,设计了基于QT的应用程序开发,以图形的方式给用户提供操作接口,实现对电机更加直观的状态显示和灵活的控制。
1 控制系统的整体设计
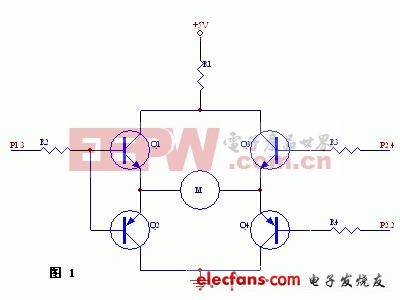
本系统的主控制器由基于32位ARM。
920T的RISC处理器Samsung S3C2440嵌入式开发板构成,内部运行嵌入式Linux操作系统,主要负责系统的控制以及与从控制器DSP的通讯等任务,主控制器通过串行通信接口(UART)实现与从控制器的数据通信,包括发送特定数据格式的控制指令和接收DSP控制器返回的传感器数据。利用Linux操作系统搭建平台并开发基于QT的图形界面,通过触摸屏实现人机接口,完成对电机和传感器的控制和传感器数据的显示。从控制器采用32位定点控制器TMS320F2812,主要完成对电机的控制,以及反馈给主控制器ARM9当前的运动状态。控制系统整体结构设计框图如图1所示。

2 串行通信设计
本系统中主控制器ARM9与从控制器TMS320F2812之间的通讯采用串行通信接口,即UART口。TMS320F2812的SCI模块利用中断进行控制,其接收和发送是双缓冲的,二者可独立地工作于全双工模式。串口通过两个可以复用和具有优先级的I/O引脚SCITXD和SCIKXD分别用于发送和接收数据,RS-232与DSP中的TTL电平之间需要配驱动和隔离电路可以组成一个简单的通信接口。在ARM9和DSP之间采用了符合RS-232标准的驱动芯片MAX3232进行串行通信,MAX3232芯片功耗低、集成度高,具有两个接收和发送通道。TMS320F2812串行接口电路如图2所示。
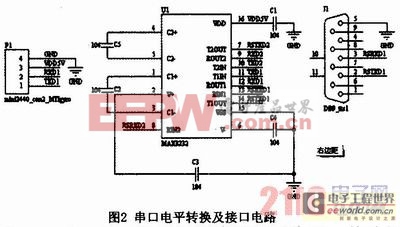
在TMS320F2812的串行通信接口工作时,其功能可以通过软件可编程实现,当接收到数据后,通过事件管理器模块中的通用定时器,PWM单元以及捕获单元对电机的方向和速度进行控制。

相关推荐
-

-
simonmao8385 | 2014-01-16
-
-
-
-

-
-
-
-
-
-
-
-
-
-

-
-
dolphin | 2014-06-12
-
-

-
-
-
simonmao8385 | 2014-01-20
评论