基于单频电磁制导方式的AGV小车

自动导向车(AGV)是采用自动或人工方式装载货物,按设定的路线自动行驶或牵引着载货台车至指定地点,再用自动或人工方式装卸货物的工业车辆。
AGV的研究与开发集人工智能、信息处理、图像处理为一体,涉及计算机、自动控制、信息通信、机械设计和电子技术等多个学科,成为物流自动化研究的热点之一。目前,AGV仍有多项关键技术有待提高和突破,以进一步提高AGV的性能,降低制造成本和减少使用费用。本文介绍的AGV主要解决导向及定位问题。
综合成本和系统稳定性能考虑,本设计采用电磁单频导向技术结合非接触式ID卡识别定位。电磁引导介质采用柔性较好的漆包线,可不用专门开敷线槽,在试用阶段可随机根据实际情况设置线路走向(可用胶带固定引导线)。非接触式ID卡识别定位,采用PS/2接口及其传输协议(市面上有很多成熟产品),在小车上安装一个ID读卡器,该读卡器的有效距离可达15 cm,在各个站安装一张ID卡,小车经过时读卡器在MCU的控制下读出ID卡信息,即可实现定位。
采用单频电磁制导方式及非接触式ID卡读卡定位方式的优点:系统比较简单,易于维护;制造成本比较低;安装简单,引导线理论上可以只用一根完整的线。
1 基本原理
电磁探测方法如图1所示。1、2、3都是电磁探测头,其中1、2是导向探头,3是计数探头,用来记录小车的位置。A、B为两个驱动轮,小车方向的改变由两个驱动轮的配合完成。前导向轮是没有动力的。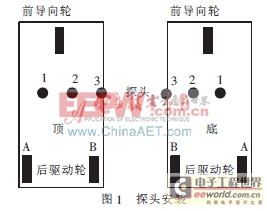
小车的驱动方式:如图1所示,小车的动力轮是后面的A、B两个驱动轮,其转向也是由这两个动力轮协调工作完成。寻线走时,当1号和2号两个探头都有信号时,小车的两个驱动轮都动,即为直走;当1号探头有信号而2号没有信号时,说明小车偏离了轨道,此时是A轮不动,B轮动,直到1、2两个探头都有信号为止;当1号没有信号而2号有信号时,A轮动,B轮不动,直到1、2两个探头都有信号为止;当两个探头都没有信号时,小车停止行走,停在原地。探头信号有无与驱动轮停与走的关系如表1所示。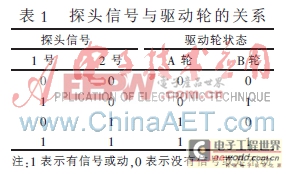
3号探头用于定位计数,每到一个站点就通过ID卡进行识别计数定位(即每测到一次信号就计一次数),直到所计的数与MCU中计算的值相等,说明小车到达了既定位置。3号探头的关键就是计数要准确,不能误计,否则就会使整个系统不能使用(小车只能一直沿着信号线走,不能定位)。
2 硬件设计
AGV小车硬件设计部分由信号发生器、制导线路、电磁信号检测、小车控制核心(MCU)、读卡器、电机驱动组成,基本的硬件结构图如图2所示。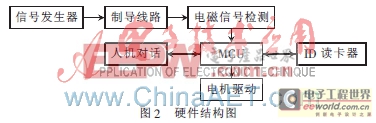
2.1 制导线路
制导线路的设置是本设计的关键部分,如果线路没有设置好,后续的所有工作将不能完成。制导线路如图3所示,其中虚线部分是屏蔽部分。由于电磁场是矢量,当电流方向大小相同且是平行的两条线时,周围的电磁都会相互抵消,故需要将虚线部分屏蔽。该布线的关键就是要将虚线部分的屏蔽工作做好,只有这样,小车才能很好地完成寻线工作。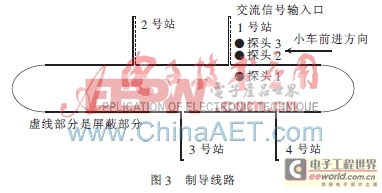
2.2 信号发生器
为了产生电磁信号,由信号发生器来产生交变的电信号。为了产生足够强的磁场,该信号发生器的输入输出电流不能太小,在使用专业的信号发生器来产生交变信号时,要将其设置成功率输出模式,输出电压约为3 V。
市面上的专用信号发生器的价格都比较贵,且其功能很多,而本设计因不能发挥其所有的性能,不需要那么多的功能,所以自制了一个简单的信号发生器,只能产生频率可调的且占空比不定的方波,其信号产生的基本流程如图4所示。
振荡信号由如图5所示的555产生。555频率可调但是占空比不可调节(会随频率变化而变化),查阅相关手册可知,555工作电压为5 V时输出的电流为100 mA。为了得到很好的寻线效果,实际的电流要大于200 mA,故需要进行功率放大,其基本电原理图如图5所示。由555及其外围电路组成的多谐振荡器,其产生方波信号频率为:
f=1/0.7×(R1+2×R2)×C0
R2是可变电阻,由该公式可以计算出信号发生器的频率范围是1.3 kHz~14.3 kHz。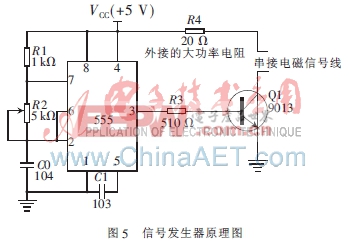

评论