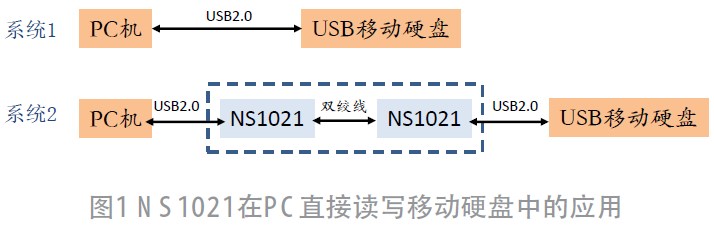
电梯串行通讯系统可靠性设计

电梯工作现场往往存在大量的干扰源,电梯控制系统一旦因干扰而产生故障,很可能酿成严重的后果。因此,在电梯串行通讯系统的设计中,如何增强系统的抗干扰能力、提高系统工作的可靠性是一个不容忽视的重要内容。
1 可靠性的基本概念
可靠性是产品的质量指标。其定义为:产品在规定的条件和规定的时间内,完成规定功能的能力。其中规定条件是指产品工作时所处的环境条件、维护条件、使用条件等;规定时间是指产品能够正常工作的起止时间;规定功能则是指产品应当实现的功能。衡量产品可靠性的常用量化指标主要有:可靠度、失效率、平均寿命、平均维修时间和利用率等。
在电梯串行通讯系统中,故障应当都是可以修复的,因此其平均寿命的确切含义应当是平均故障间隔时间MTBF(Mean Time Between Failure)。另一个重要指标则是故障平均修复时间MTTR(Mean Time To Repair)。
2 保证电梯串行通讯系统可靠性的方法
2.1 提高系统各单元的MTBF
根据可靠性设计的有关理论,单元越简单,可靠性就越高。因此,电梯串行通讯系统最好设计成集散控制系统,即将整个系统分解为多个自律性极强的独立单元,每一单元都比较简单,可靠性大为提高。而且当某一单元发生故障时不会影响整个系统。此外,结构上的分散也就意味着控制的分散、供电的分散、负荷的分散和干扰的分散,因此从根本上分散了影响系统可靠性的外部因素,从而保证系统能够达到很高的MTBF。
目前在电梯串行通讯技术中占主导地位的是主从结构的BITBUS网络系统,它采用RS-485总线,通讯结构为命令、响应式。其潜在的危险就是采用了集中控制方式,一旦主节点出现故障,整个系统将瘫痪,而具有多主结构的CANBUS总线却可以克服上述缺点。它可以多主方式工作,网络上任一节点可以在任一时刻向网络上其它节点发送信息,不分主从,因此可以很方便地构成冗余(容错)系统。CAN的每帧信息都有CRC校验及检错措施,而且CAN节点在错误严重时具有自动关闭总线的功能,切断它与总线的联系,使总线上其它操作不受影响,具有很高的可靠性。因此,采用CANBUS总线很容易构成“集中管理、分散控制”的集散控制系统。可以预见在不远的将来,CANBUS将逐渐取代BITBUS,成为电梯串行通讯系统中的主流产品。
另外,在硬件电路板制作时,对所用元器件应严格筛选,选用具有低失效率的器件,对某些重要的元器件进行降级使用,元件在使用前进行老化处理使之进行偶然失效期等,从而在元件级很大程序地保证系统高可靠性。
2.2 降低系统各单元的MTTR
采用CANBUS总线的电梯串行通讯系统由于采用了模块结构设计,各个模块功能简单,易于维护,在发生故障时便于及时发现故障位置,迅速更换,有利于缩短系统的平均维修时间MTTR,从而提高系统的利用率。此外,还应开发使用在线快速排除故障的设计方法,使用硬件自诊断和故障部件的自动隔离、自动恢复和热机插拨技术。当系统出现异常,通过硬件自诊断机能和测度机能检出后,迅速进行自我故障排除,若不能排除,则迅速报警,并将故障信息显示于控制柜操作面板。
2.3 冗余与容错设计
容错设计的出发点是承认各单元发生故障的可能,进而设法保证即使某单元发生故障,系统仍能正常工作。为使系统具有容错能力,必须在系统中增加适当的冗余单元,保证当某个单元发生故障时能由冗余单元接替其工作,原单元修复后再恢复出错前的状态。所以容错与冗余是同时使用的技术。
对于采用主从结构的BITBUS总线的电梯串行通讯系统,如果进行冗余容错就必须对整个系统进行冗余,这显然很复杂且很不经济。而对于采用多主结构的 CANBUS网络的电梯串行通讯系统,由于各单元的相对独立和相对简化,使得冗余容错比较容易实现,同时还便于在冗余时突出重点(如电梯操纵箱),减少不必要的冗余,从而使系统更加经济实用。
在采用CANBUS网络的电梯串行通讯系统中,为提高控制系统的可靠性,还可以设计2台控制柜主电脑,互为备用地执行监控任务,好构成双机冗余系统。其中1台作为主机投入系统运行,另一台作为备份机也处于通电状态。当主机出现故障时,专用程序切换装置便自动地把备份机切入系统运行,承担起主机的任务。而故障排除后,原主机则转为备份机,处于待命状态。这种设计方式对于单梯运行可能要增加些成本,而对于并联或群控梯,则在不增加任何硬件成本的前提下,使系统的可靠性大大提高。
2.4 诊断技术
诊断技术实质上是一种检测技术。所谓诊断,就是将测试取得的诊断信号与设定的标准相比较,或利用事先确定的征兆与故障之间的对应关系,来确定故障的种类和部位,进而达到排除故障甚至预防故障的目的。
例如,对于电梯串行通讯系统中的单片机,受外界干扰时可能会产生程序弹飞这一问题,可以设置监视跟踪定时器来监视程序运行状态。定时器的定时时间稍大于主程序正常运行1个循环的时间,而在主程序正常运行过程中执行1次定时器时间常数刷新操作,这样,只要程序正常运行,定时器就不会出现定时中断,而当程序弹飞或失常时,则因无法按时刷新定时器时间常数而导致定时中断,利用定时中断服务程序将系统复位。
3 串行通讯系统硬件抗干扰措施
电梯串行通讯系统中的元器件由于经过筛选和老化处理,因此可靠性很高,平均无故障间隔时间MTBF很长,因此引起控制系统故障的原因多半不在于其本身,而在于从各种渠道进入控制系统的干扰信号。电梯工作现场的干扰一般都是以脉冲的形式进入微处理器,干扰窜入系统的渠道有3条:空间干扰、过程通道干扰和供电系统干扰。为减少系统的错误和故障,提高系统的可靠性,就必须采用抗干扰措施,提高系统对环境的适应能力。
3.1 3种常见的干扰及其抑制
3.1.1 串模干扰
串模干扰是串联于信号源回路中的干扰,也称横向干扰或正态干扰。产生串模干扰的原因有分布电容的静电耦合,长线传输的互感,空间电磁场引起的磁场耦合以及50Hz工频的高次谐频干扰等。用双绞线作为电梯串行通讯系统中的信号引线,不但可以降低成本,而且可以有效地抑制串模干扰。这是由于双绞线中每个绞线环绕向的互反特征,从而使各个小环路的电磁感应互相抵消。另外,采用低通滤波器可以有效地抑制电源高次谐波。




评论