基于CAN总线和PCC的多电机消隙天线控制系统

1引言
在高精度天线控制系统中(如跟踪卫星通信天线),精密跟踪和方位控制对天线的传动系统精度提出了极高的要求。但是由于存在机械加工误差、机械磨损和传动齿轮之间存在一定的间隙,既影响天线控制系统的跟踪精度,又影响天线控制系统的稳定性。因此必须消除传动齿轮之间的间隙,提高传动精度。
为解决这一问题,人们想了很多方法。传统的方法是对机械的传动结构进行改进。但从已知的消除齿轮间隙的方法看,它们总存在这样或那样的不足,如结构复杂、尺寸大、承载能力差等。因此在高精度天线控制系统中传统的消隙方法无法使用。本控制系统采用多电机来消除传动机构中的齿轮间隙,从而提高传动精度。
基于以上分析,该系统采用基于可编程计算机控制器(Programmable Computer Controller,简称PCC)和CAN总线的控制系统。多电机消隙天线控制系统在天线控制系统中应用比较普遍,特别是对于大型雷达天线的转台的消隙就更为常见。该案例采用目前流行的CAN总线技术和PCC等工控产品,为实现天线转台的消隙、方位、俯仰等控制功能,提供了多电机控制的全套解决方案。该方案具有以下特点:
(1)采用CAN总线对四台直流调速器进行组网,不仅实现了全数字控制,而且结构简单,数据通信简便,可靠性高。
(2)数字速度调节器具有力矩均衡分配和环路控制功能。
(3)实现转台的方位、俯仰双向转动均衡式消隙。
(4)高效精确的控制算法,可以实现天线控制系统精确定位、目标跟踪、俯仰、环扫、扇扫。
(5)实现三电机、双电机或单电机的运行(降功率)。
2 CAN总线简介
CAN,全称为“Controller Area Network”,即控制器局域网,是国际上应用最广泛的总线之一。它是一种在自动化领域内广泛使用的多线路协议和有效地支持分布式控制或实时控制的串行通信网络。CAN的应用范围遍及汽车、机械、医疗设备、建筑环境以及工业自动化行业的其它很多领域。
CAN总线之所以能得到如此广泛的应用,其主要原因如下:
(1)强有力的错误检测能力及差分驱动功能。
(2)在十分苛刻的环境中仍运行良好。
(3)在传输介质和线路设计方面,CAN总线也十分灵活。
CAN总线具有下列主要特性:
(1)低成本。
(2)极高的总线利用率。
(3)相当长的传输距离(长达10km)。
(4)高速数据传输速率(高达1Mbit/S)。
(5)可靠的错误处理和检错机制。
(6) 发送期间若由于出错而遭破坏的信息可自动重发送。
(7)节点在严重错误的情况下具有自动退出总线的功能。
3 实施方案
3.1 系统设计的总体框架
多电机消隙天线控制系统采用贝加莱公司的可编程自动化控制器(PCC)为主控制器,并采用其Automation Studio集成软件平台所包含的高级语言BASIC编制硬件驱动程序和速度PID算法,通过CAN总线通信实现对四台直流控制器的组网控制,从而实现对四台转台驱动电动机的协调控制,共同驱动一个转台。实现力矩的分担和传动间隙的消除,从而提高系统跟踪精度。
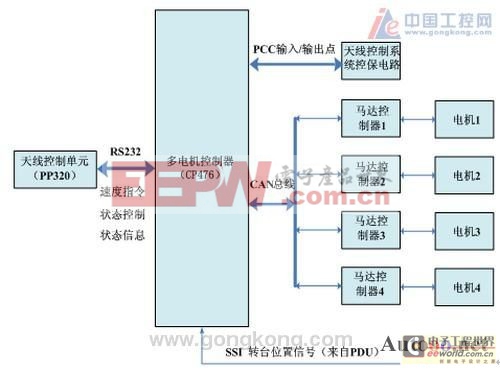
图1 多电机消隙天线控制系统的控制网络结构










评论