嵌入式操作系统μC/OS-Ⅱ面向数控系统的改进

1 μC/OS-Ⅱ对任务的分类
μC/OS-Ⅱ中每个任务有5种状态:休眠(DORMANT)、就绪(READY)、运行(RUNNING)、等待(WAITING)、中断(ISR)。休眠状态的任务驻留在存储器中,还未被内核使用;就绪状态的任务准备执行,优先级低于当前执行的任务,没有得到CPU控制权;任务得到CPU控制权后就处于运行状态;等待事件发生的任务处于等待状态,事件可以是I/O操作完成、共享资源可以利用、时钟周期到等;任务执行过程被中断服务例程中断,任务就处于中断状态。
2 μC/OS-Ⅱ面向数控系统的改进
2.1 数控系统任务的特点
在数控系统中,任务可分为两种:周期运行的任务和信号触发运行的任务,这里所说的信号即包括硬件信号,也包括软件信号。周期运行的任务有定时信号采样、定时I/O口扫描、定时通信等。信号触发运行的任务有中断信号(硬件信号)触发的中断服务任务,命令消息信号(软件信号)触发的命令解释任务等。另外,数控系统中,有些任务还具有运行时间短,运行频率高,要求实时性高的特点,如信号采样、数控机床中的插补控制等。
2.2 改进后的任务划分
在改进后的嵌入式操作系统中任务分为两类:普通任务和抢占式任务。普通任务指通过操作系统调度器调度运行的任务,调度方法如图1所示;抢占式任务指那些不通过调度器调度运行,而是在中断处理中直接运行的任务。下面详细说明这两种任务。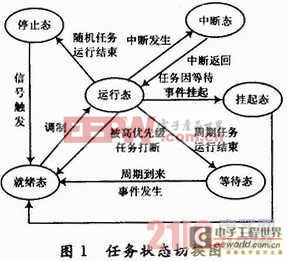
2.2.1 普通任务
根据数控系统任务多为周期任务和信号触发任务这一特点,将普通任务分为两种:定时运行的周期任务(简称周期任务)和信号触发运行的随机任务(简称随机任务)。相应的,任务状态被划分为6种:运行态、就绪态、等待态、停止态、挂起态和中断态。图1为改进后的任务状态切换图。
在这六种状态中,运行态、就绪态和中断态对应μC/OS-Ⅱ的READY,RUNNING和ISR;挂起态是任务在执行完成前,因等待某事件或资源而被迫停止运行,等待事件或资源到来的状态;等待态是周期任务完成一次运行,等待运行周期到再次运行时的状态;停止态是随机任务等待其触发信号的状态。这里去掉了休眠态,即没有任务的删除,所有的任务一旦建立,在系统运行期间一直存在。这样的处理是因为在数控系统应用中,所有建立的任务一定是有用的,即在系统运行期间一定会被执行,无用的代码和任务不会被添加。在μC/OS-Ⅱ中,设定每个任务都是一个无限的循环,即任务函数永不返回,这样做是不合适的。该操作系统允许任务函数返回,返回后调用函数OSTaskEndDeal(),该函数根据任务的类别,把周期任务放入等待队列,把随机任务放入停止队列。
2.2.2 抢占式任务
抢占式任务为执行时间短且执行频率高于OS系统时钟频率(如信号采样),或实时要求高(如数控机床中的插补控制)的任务。调度任务时间(主要是任务切换所花费的时间)往往比这类任务运行一次的时间还多,这显然是不合理的,抢占式任务正是为解决这种不合理而设计的。抢占式任务不通过OS调度器调度运行,也不采用TCB(任务控制块)标识它们,而是在它们的中断触发信号到达时,在中断中_直接处理,这样做节省了调度、任务切换的时间。但是,由于抢占式任务没有TCB,也就没有相应的任务堆栈,所以抢占式任务在使用资源上要特别注意:一定要使用独立的资源。这样既可以使抢占式任务正常运行,又可以避免抢占式任务对被中断程序的环境造成破坏。具体办法如下:
(1)专用寄存器组。若处理程序中使用了寄存器,则为其分配专用的寄存器组,这样也省去了保存/恢复寄存器的时间消耗。

评论