基于VB的计算机与软起动器的通讯

随着电力电子技术、微电子技术的发展,软起动器因其起动效果好、控制方便、性能可靠等特点,逐渐取代了传统的自耦降压起动、y/△起动方式,广泛应用于交流电动机的控制上。
在自动化领域,随着分布式控制系统的发展,只能现场控制的封闭控制模式已不能满足需要,这种对生产设备的实时自动控制及生产流程的实时监控的需要,促使电器设备在网络通讯方面得到了快速的发展。
rs-485采用半双工工作方式,通讯距离可达几百米到上千米。采用平行发送和差分接收,具有抑制共模干扰的能力。用于多点互连时非常方便,可以节约信号线。应用rs-485可以联网构成分布式系统,它允许最多并联32台驱动器和32台接收器。rs-485标准接口的这些特点使之适合电力自动化系统设备层与间隔层之间的通讯要求。因此目前电力自动化系统中,各测量单元、自动装置和保护单元常配有rs-485标准接口。用户可以根据通讯协议开发通讯程序,通过上位机监控软起动器的运行。
本文以西安西普电力电子有限公司的strc系列软起动器为例,介绍基于rs-485总线的计算机与多台软起动器通讯的设计。
2 系统的硬件连接
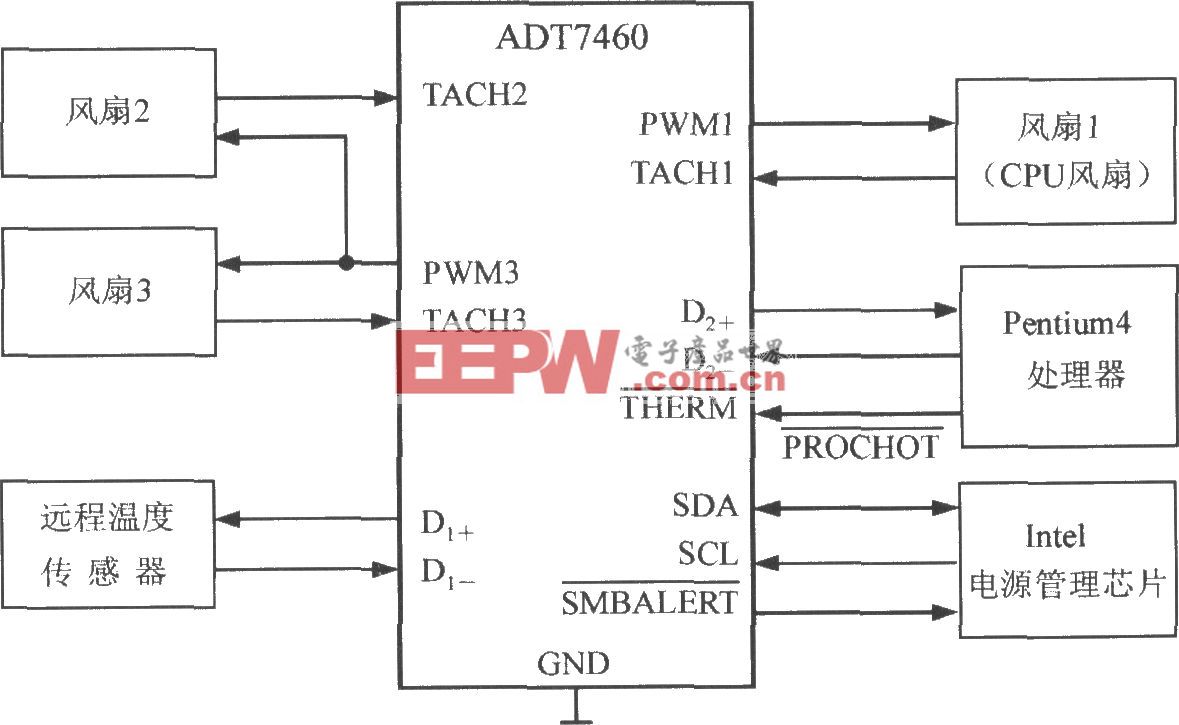
strc系列软起动器是西安西普电力电子有限公司推出的高性能的16位微处理器全数字控制起动装置,执行速度快、准确性高,它内置的标准rs-485通讯接口,可以方便的与上位机进行串行通讯,实现上位机对软起动器功能参数的查询、设置、修改及运行状态和运行参数的直观监控,实现组网运行。系统组成如图1所示。
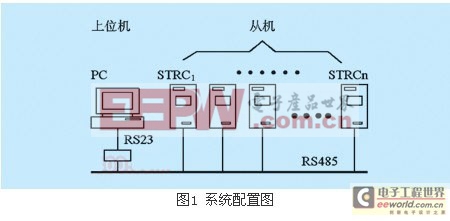
由于计算机只有rs-232口,因此计算机需通过一个rs232/rs485转换器接入rs485网,参与对软起动器的控制。系统中,软起动器作为从机与计算机组成“一主多从式”控制网络。
3 strc系列软起动器的通讯协议
rs-485标准只对接口的电气特性做出规定,而不涉及通讯协议,通信协议是在接口硬件电路的基础上用户自行规定的。
由于软起动器为现场工业级智能设备,且通讯不是优先级最高的中断,因此协议采用问答式握手协议,这种通讯协议响应快,准确率高,是目前现场级设备常用的通讯方式之一。
3.1 数据格式
软起动器采用异步通讯格式, 由1位起始位, 8位数据位, 1位奇偶校验位, 1位停止位组成。其中奇偶校验位作为地址选择标志,复位为等待响应信号状态; 置位为闲置状态。
可通讯的波特率有:600bps、1200bps、2400bps、4800bps、9600bps、19200bps。缺省设置为9600bps。
pc机与软起动器的通讯方式为异步半双工,传送的数据均为二进制码。
3.2 通讯过程
在pc机与软起动器的通讯过程中,pc机始终是指令的发出者,软起动器不能主动向pc机发送指令或数据,始终是指令的响应者。pc机以广播的形式发送指令,网络上所有从机同时接收到上位机发送的指令,然后与本机地址比较,只有与指令地址相符的软起动器才响应指令,并发出响应信息如图2所示。根据pc机对软起动器的操作方式,有3种通讯过程。






评论