一种高精度的超声波智能测距系统的设计方案

1.引言
1.1 国内外发展的概况
智能测距系统目前在国内有一定的研究水平,多用于汽车工业以及智能机器人的导航系统和相关领域。它们所产生的超声波的频率、功率和声波特性各不相同,因而用途也各不相同。目前较为常用的是压电式超声波发生器。
超声波由于指向性强、能量消耗缓慢且在介质中传播的距离较远,因而经常用于距离的测量。它主要应用于倒车雷达、测距仪、物位测量仪、移动机器人的研制、建筑施工工地以及一些工业现场等,例如:距离、液位、井深、管道长度、流速等场合。利用超声波检测往往比较迅速、方便,且计算简单、易于做到实时控制,在测量精度方面也能达到工业实用的要求,因此得到了广泛的应用国内这一类的测距技术较为完善,但是这类系统外围电路相对复杂,显示部分不够形象,而且精度不高,大部分停留在厘米级别。
1.2 系统的功能、性能要求
本设计“高精度超声波智能测距系统”能够实现2cm-4m范围内的精确测量功能,精度可达0.1mm,LCD液晶屏汉字显示功能,以及距离分段报警功能。实物体积小、功耗低、便于嵌入到其他系统,具有一定的使用价值。
2.系统结构
2.1 系统结构框图
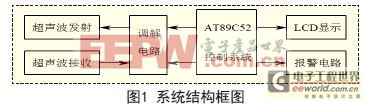
2.2 基本工作原理
通过单片机驱动程序在P1.2口产生40KHZ的方波经调解电路驱动超声波发射探头发生,遇到障碍物经反射由P1.1口超声波接收探头接收;经单片机内部定时电路计算时间,从而导出障碍物距离探头的距离由接在P0端口的LCD12864显示;距离阈值分为0-1m;1m-1.5m;1.5m以上三段不同频率报警。
3.硬件设计
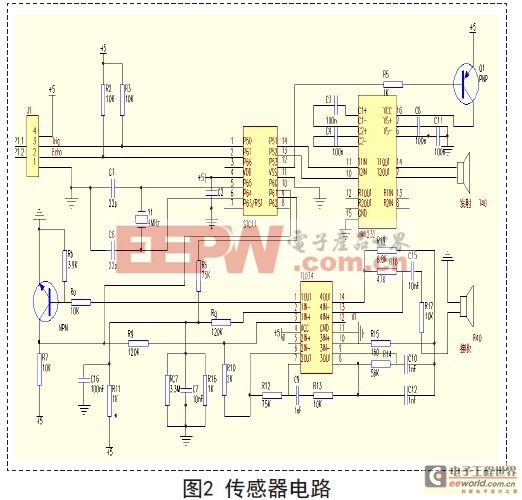
超声波传感电路:
(1)采用IO触发测距,提供至少10us的高电平信号;
(2)模块自动发送8个40kHz的方波,自动检测是否有信号返回;
(3)有信号返回,通过IO输出一高电平,高电平持续的时间就是超声波从发射到返回的时间。测试距离=(高电平时间(340m/S))/2;如图2所示。







评论