基于MCS-51单片机的测控系统的软时钟设计的优化

由于入口引导与装入初值低位字节共占4个机器周期,所以为了使中断周期等于O.1s基准时间,上文对按理论推算出来的初值进行了加4修正。尽管如此,按照方法1设计的时钟程序与测控系统的其他程序有机联接在一起运行时,要实现准确定时也是十分困难的,因为在实用工业测控系统中常常不止1个中断源,而是含有多个中断源,存在着中断优先权的管理问题。要使上述软时钟能够准确定时,T0中断必须设置为高优先级,这样CPU对T0的定时中断才有可能不受影响,确保每隔0.1 s执行一次定时中断服务程序。如果T0定时中断被设置为低优先级,那么CPU对T0定时中断的响应就要受到影响。当CPU正在执行某一高优先级中断源的中断服务程序时,T0计数满会产生中断请求,CPU必须等到当前正在执行的中断服务程序执行完毕之后,才能响应T0中断,这必将延长中断间隔,使初值不能如期装入,破坏定时的准确性。由此可见,采用方法1设计的时钟程序限制了系统设置中断优先级的灵活性,降低了设计效率。例如,某些以数码管作为显示器的测控系统,为了节省硬件开销,通常采用对数码管进行巡回扫描的方法进行显示输出,为使显示稳定,且无抖动现象,必须将数码管显示中断设置为高优先级,以便保证扫描程序的执行周期固定不变,这便与时钟定时中断对优先级的要求发生了矛盾。为克服方法1的缺陷,在实际工程中,通过采用如下所述的方法2来设计时钟程序,可获得较好的效果。
三、 软时钟程序设计方法2—中断周期累加法
方法2和方法1的程序结构是完全相同的,只是在对秒以下时间的处理上有所不同。将方法1的中断服务程序中“O.1 s单元增加1”程序段改为:

通过对照容易看出,虽然两个“O.1 s单元增加1”程序段所用指令不同,但效果是完全一样的,可以互相替代。改动后的程序将对0.1 s中断周期的计数,变成了对O.1 s中断周期的累加,由此引申,对任何小于秒的中断周期都可以进行累加,当最高位有进位时实施秒增1,同样可以达到时钟定时的目的。MCS-51单片机内部定时器选择工作方式1时为16位计数器,在上述假定条件下,当初值为0时,T0的定时中断周期T=0.131 072 s,131072定义为中断周期常数,在中断服务程序中对其进行累加。以下是采用方法2设计的时钟程序。
定义中断周期常数:
C*T: DB 00H,13H,10H,72H
初始化程序:
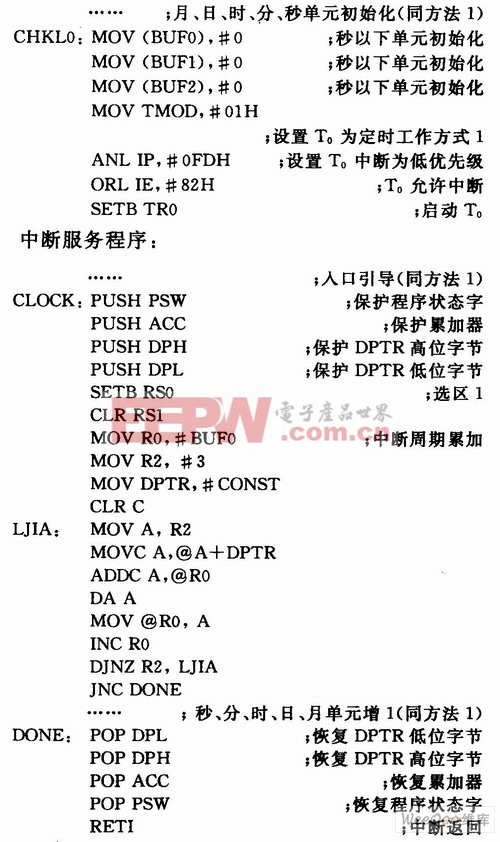
方法2采用对中断周期进行累加的方法,令定时器满量程计数,初值为O,计数满后,自动重新从0开始计数,不需用程序装入初值,从根本上摆脱了装入初值的困扰,当然也就避免了对初值进行修正的繁琐过程。由于不需要装入初值,CPU可在中断周期的任意时刻,响应定时器的中断请求,只需保证下一次中断请求到来之前将中断服务程序执行完毕即可,从而使定时器大大降低了对中断优先级的要求。因此方法2将定时器中断设置为低优先级,而方法1则将其设置为高优先级。显然,采用方法2不仅便于程序设计,而且提高了程序设计的效率。
方法2中,当定时器满量程计数时,中断周期不再是标准的0.1 s,因此中断周期在累加过程中向秒单元的进位,大多数发生在非整秒时刻,而且进位间隔也不尽相同,具体来讲,假设秒以下时间单元从0开始累加,那么向秒单元进位第一次是在1.048 576 s时刻,第二次是在2.097 152 s时刻,第三次是在3.014 656 s时刻,…,第一次与第二次间隔为1.048 576 s,第二次与第三次间隔为0.917 504 s,……,进位间隔有时候大于1s,有时候小于1 s,然而,对分、时、日、月这些长期时间过程来说,积累误差可以认为等于O,从这个意义上说,方法2大大提高了定时精度。
四、结语
本文提出了采用MCS-5l内部定时计数器作为软时钟设计的方法。这种方法不仅节省了硬件开销,而且提高软时钟的定时精度,具有广泛的实际应用价值。在实际测试中,当晶体振荡器的振荡频率不是标准6MHz时,可以调整中断周期常数,以及必要时通过增加秒以下时间单元缓冲区的字节数,使中断周期常数准确到所需精度。
参考文献:
[1].MCS-51datasheethttp://www.dzsc.com/datasheet/MCS-51_477840.html.


评论