基于80C51的开关磁阻电机远程控制系统的研究
2.2 CAN节点电路设计
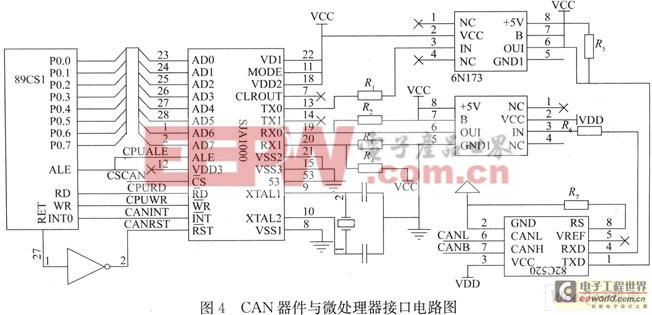
系统各节点采用89C51单片机作为微处理器,选用SJA1000作为CAN控制器,并使用CAN控制器接口芯片82C250。为进一步提高抗干扰能力,在两个CAN器件之间使用了由高速隔离器件6N137构成的隔离电路。CAN器件与微处理器的硬件连接图如图4所示。硬件电路中使用82C250的目的是为了增大通信距离,提高系统的瞬时抗干扰能力,保护总线。
3 CAN总线通信软件设计
远程控制系统软件设计包括初始化程序与通信主程序设计。CAN初始化只能在复位模式下进行,初始化主要包括工作方式的设置,波特率参数设置和中断允许寄存器IER的设置。作为软件设计核心部分的是RS-485CAN接口通信编程,其程序流程图如图5所示。

4 基于卡尔曼滤波器的SRD控制器设计
在SRD控制策略上,主要以线性模型为基础,结合传统PI或PID控制器。但是普通PID控制器的参数难以自动调整,由此构建的SRD系统难以获得理想的输出特性。对于SRD系统中存在过程及测量噪声,状态变量受到污染,可以利用卡尔曼滤波技术进行滤波,将卡尔曼滤波器与传统的PID相结合,可以使SRD系统控制效果得到明显改善。
4.1 卡尔曼滤波器原理
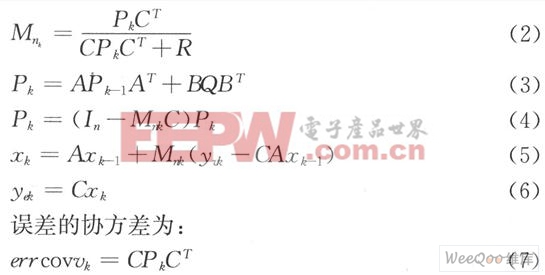
卡尔曼滤波是以最小均方差为准则的最佳线性估计,它根据前一个估计值xk-1和最近一个观测数据yk来估计信号的当前值,利用状态方程和递推方法进行估计。设向量非平稳状态序列xk和yk用下面的动态方程描述:

式中:ωk为过程噪声信号,vk为测量噪声信号卡尔曼滤波的递推算法为:
4.2 基于卡尔曼滤波器的PID控制结构与仿真
基于卡尔曼滤波器的PID控制系统的结构图如图6所示。



评论