基于S7-200的多关节机械手的PLC控制

1 引言
随着工业自动化的发展,机械手的出现大大减轻了工人的劳动强度,提高了劳动生产率,但传统的继电器控制的半自动化装置因设计复杂、接线繁杂、易受干扰,从而存在可靠性差、故障多、维修困难等问题,为解决以上问题,可以采用可编程控制器plc控制的机械手控制系统。
s7-200 plc (program logic controler)是德国西门子公司生产的小型可编程控制器,具有良好的可扩展性、价格低廉、指令功能强大、十分适合机械手控制系统中的应用。但一般工业机器人执行机械手机构多为形状简单的夹钳式、托持式、吸附式等结构,其结构和抓握目标物的原理决定了有限的抓握功能,随着机器人应用范围的日益扩大和向智能化,拟人化方向的发展,其手部也有多指多关节的拟人化要求,另外在工伤、事故中断手的残疾人也需要功能价格比高的多关节机械手,为此我们设计出一套新的基于s7-200 plc的多关节机械手控制系统,该系统动作简便、线路设计合理、具有较强的抗干扰能力,保证了系统运行的可靠性、降低了威胁率,提高了工作效率。
由于plc控制受环境的限制,在使用过程中会受到各种干扰,影响系统的可靠性,因此必须采取各种抗干扰措施,以提高控制系统的可靠性。
2. 机械设计
2.1 机械结构
多指多关节的机械结构是最理想的机器人手爪,其每个手指的各个关节都各有一台独立的电机驱动,并配有传感和控制系统,使手爪能完全模拟人手动作,当抓取的目标物各边形状与手爪中心不对称时,每个手指各关节的弯曲程度可以不同,手爪对被抓物体的形状具有适应性。先接触物体的手指其指关节产生较大的抗力而不能弯曲,而其他未接触到物体的手指将继续弯曲,直到每一个手指都接触物体,其结构如图1所示。

2.2 工作原理
直流电机1经谐波减速器2减速后带动丝杠3旋转,使螺母4在导向杆12中上下移动,螺母4带动五根连杆5使四个手指的第一指节7转动,手指安装在弹性支座(手掌)6上,弹性支座6上另有五根固定拨杆8插入各手指的第二指节10上端的凹槽中,使第二指节在第一指节旋转时能同时绕第一、第二指节间的关节轴转动,而第一指节7下端装有固定拨杆9插入第三指节11上端的凹槽中,使第三指节同时随第一、第二指节的转动而绕第二、第三指节间的关节轴转动,从而形成三个指节联动抓握或放开目标物体,其抓握原理如图2所示。

当抓取的目标物各边形状与手爪中心不对称时,每个手指各关节的弯曲程度可以不同,手爪对被抓物体的形状具有适应性,先接触物体的手指其指关节产生较大的抗力而不能弯曲,当螺母带动连杆5继续上移时,及手指的弹性支座6将向上翘起使手指不再弯曲,而其他未接触到物体的手指将继续弯曲,直到每一个手指都接触物体,如图2(b)所示,因而同一电机驱动的五个手指能像人手一样适应目标物体的形状进行可靠抓取。
3 plc控制系统设计
3.1 总体设计
plc控制系统设计时不能过分依靠plc本体,使用外部继电器能够完成控制要求的,应使用外部继电器,系统电机采用自耦降压启动,由于设计时取消外部时间继电器,采用启动信号直接输入plc,经plc内部计时器输出运行信号,启动时间难于精确确定,而且负荷变化将引起启动时间变化,从而当用户想要调整启动时间时就比较困难,需要具备plc编程知识及相关编程工具,而一般的用户或电工并不具备这样的条件,因此采用plc内部计时器作为启动时间控制就颇费周折,也不利于现场控制及日后维护。
ptc的自动控制程序的编写方法很多,根据多关节机械手的特点,要求每一个动作严格按顺序执行,因此采用步进指令编写,以保证机械手的运行有条不紊。
在顺序及连锁控制中,涉及平行并联关系的机号,考虑到操作上的便利,让plc能自动选择运行电机,方便电机在运行过程中能够有选择地运行,连锁关系为4级,见图2所示,前两极中有并列选择运行的电机(d1,d2,d3,d4)。
电机工作原理主要是控制电机的选择,其电气工作原理如图3所示,将开关s拨到集中控制时,k2吸合给plc一个信号,让plc识别该电机需要运行,而没有选择集中控制的电机则认为暂时不运行。

3.2 延时报警系统
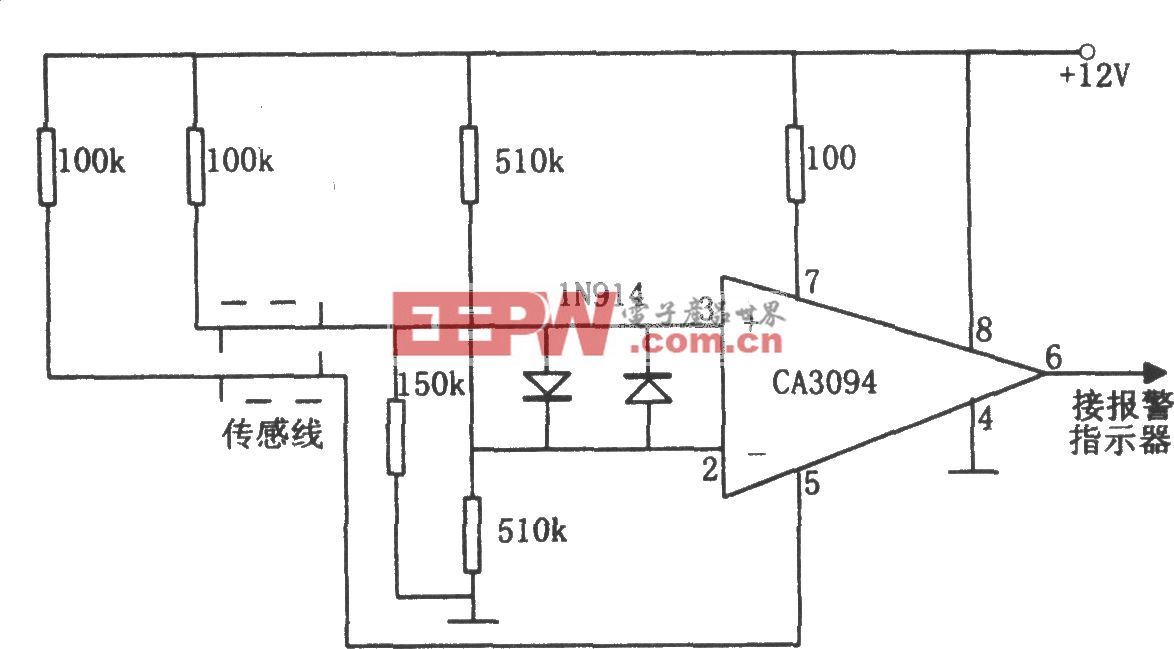
为避免因压力不足或机械手动作不到位造成的误动作,系统设置了延时报警系统,如图4所示。

当某一机械手爪因故障被卡超过设定时限,延时报警系统将动作:设y5为控制该电机动作的继电器,x5为对应动作的限位,若该动作超时,对应的时间继电器t4将动作,则t4的动合触点接通,首先接通y18,切断电源,停止电机运行,因故障排除按钮为动作,内部继电器r0未导通,则y16接通,与之相连的报警蜂鸣器通电发声报警,与此同时,r901c导通后周期性地通断,通过已接通的t0导通y17,使与之相连的报警指示灯不断闪烁,提醒工人排除故障,从而避免机械手爪故障加重造成抓举动作失败而造成严重后果。一旦故障排除,x14接通,内部继电器导通,其通断触电打开,蜂鸣器停止报警,报警灯熄灭。
4 抗干扰设计
4.1 防输入/输出信号干扰的措施
防输入信号的线间干扰,机械手plc控制系统中的这种干扰虽然可以通过输入单元的滤波电路使其衰减,然而,输入信号线与大地间的共模干扰在控制器内部回路产生大的电位差,可能引起控制器误动作,因此,为了抗共模干扰,除控制器要良好接地外,在设计肋骨冷弯机plc控制系统时还采取了以下两种抗干扰措施。
(1)在输入端并接续流二极管使机械手的plc控制系统中只有直流输入信号,因此采取并接续流二极管(只在信号输入端有感性负载时采用)的方法,可以防止信号变化时感应电势损坏输入单元。
(2)防感应电压的措施,尽量避免机械手plc控制系统的输入信号线与电源线平行走线,输入端并接浪涌吸收电路,在长距离配线和大电流的场合,感应电压采用继电器转换。
4.2 plc控制系统的接地方法
(1)由于plc机柜和操作台、配电柜等用电设备的金属外壳及控制设备正常不带电的金属部分,由于各种原因(如腐蚀、绝缘破损等)而有可能带危险电压,所以应该进行保护接地,低于36v供电的设备,无特殊要求可不做接地保护。
(2)plc控制系统中的基准电位是各回路工作的参考电位,基准电位的连接线称为系统地,通常是控制回路直流电源的零伏导线,系统接地的方式有浮地方式、直接接地方式和电容接地方式。
(3)为防止静电感应和磁场感应而设置的屏蔽接地端子应做屏蔽接地。其中信号回路接地和屏蔽接地又通称为工作接地。
一般以上接地方法的控制原则是:保护地和工作地不能混用,这是由于在每一段电源保护地线的两点间会有数毫伏,甚至几伏的电位差,这对低电平信号电路来说是一个非常严重的干扰。屏蔽地,当信号电路是单点接地时,低频电缆的屏蔽层也应单点接地,如果电缆的屏蔽层接地点有一个以上时,将产生噪声电流,形成噪声干扰源。
本系统采用的接地电阻都需要在规定的范围内,对于plc组成的控制系统一般应小于4ω,而且要有足够的机械强度,事前都需要进行防腐处理。plc组成的控制系统进行单独设置接地系统,也可以利用现场条件进行“等电位联结”进行接地设计。
5 上位机与plc数据通信
plc上位机的通信是plc应用于控制的重要环节。s7-200通过选择合适的通信口工作方式与上位机通信,s7-200系列plc的通信口有3种工作方式:ppi(point-to-piontinterface)方式、freeport(自由口)方式、profi-bus-dp方式。
由于自由口方式具有与外围设备通信方便、自由,易于微机控制软件开发等特点,因此本系统使用自由口方式实现plc与上位机通信,但在自由口通信方式下,上位机与plc的最大通信能力为187.5kb/s,无法满足上位机与plc高速通信的考虑需要,使用一系列siemens,simatic,microcomputing,active x控件,用于对plc的数据操作,并选用适当的通信协议实现了上位机与plc的高速通信,取得了很好的控制效果。
6 结语
可编程控制器plc以其丰富的i/o接口模块,高可靠性、在机械手控制的设计中起到了十分重要的作用,但在plc控制的过程中,还有许多问题需要解决,本文就设计过程中的几项关键问题提出了自己的一些看法,经实践证明,可以有效地提高系统的抗干扰能力,对plc读、写,事件响应等通信时间可进行精确控制,取得了良好的效果。





评论