基于多智能体的城市智能交通控制系统设计

根据中国目前的交通现状及面临的问题说明交通控制在经济发展及城市化进程中的重大作用,并提出发展智能交通系统的重要目的和现实意义。智能交通系统是一个涉及面广、综合各种高新技术的研究领域。以下重点介绍智能交通系统分类及基于多智能体的城市交通控制系统设计。
1 国内城市交通现状及面临的问题
我国城市交通现状是:城市交通基础设施建设速度跟不上迅速增长的交通需求;常规公共交通萎缩;出租车和私人小汽车迅速增加;轨道交通开始起步;交通管理技术水平低。以上问题导致交通拥挤、交通事故、环境污染、以及能源问题将会日趋严重。
面临的问题是:车型种类繁杂、混合交通严重;自行车等非机动车数量惊人;城市布局和交通不相适应;出行方式单一、没有选择余地;步行困难、事故多发。
2 城市交通控制的目的和意义
随着社会经济的发展、城市化进程的加快和机动车辆的迅猛增加,城市交通问题日益严重。城市交通拥挤不仅造成交通事故频发、车辆延误增大,而且进一步带来能源浪费和环境污染的加剧,由此引起的不良社会后果更是难以估计。目前,城市交通问题已成为全球经济发展的瓶颈,是全球性的“城市病”之一。交通控制的目的是要在确定的行政规范约束下,应用先进的技术手段,采用合适的运作方式来确保公共和私人运输方式具有最佳的交通条件。具体来说,交通控制的目的表现在以下几个方面:欲了解更多信息请登录电子发烧友网(http://www.elecfans.com)
(1)减少交通事故,增加交通安全。通过实施交通控制,可以把发生冲突的交通流从时间和空间上进行分离,从而减少交通事故,增加交通安全。
(2)缓和交通拥挤,提高交通效益。合理的交通控制,可以对交通流进行有效的引导与调度,使城市交通流保持在一种平稳的运行状态,从而避免或减缓交通拥挤,缩短在路车辆的交通延误,提高交通运输的整体效益。
(3)减少环境污染,降低能源消耗。实施良好的交通控制,可以减少在路车辆的停车次数,保持车辆在较佳的状态下运行,大大减少尾气排放和能源消耗。
3 城市交通控制系统的分类
城市道路交通控制系统可以从不同的角度进行分类,这里分别从空间关系、控制方式上对城市道路交通控制系统简单分类。
3.1 按空间关系划分
从空间关系上可以把城市交通系统分划为单交叉口控制(点控制)、交通干线的协调控制(线控制)和区域交叉口的网络控制(面控制)三种形式。
(1)单个交叉口的点控制
单个交叉口的点控制是一种最基本的控制方式。孤立交叉口点控制的控制参数是信号周期和绿信比,控制的目标一般是车辆延误和交叉口的通行能力。在理想的情况下,希望总延误时间最小和交叉口的通行能力得到最大的利用。由于点控制的设备简单、投资省、维护方便,至今仍是应用较多的一种信号控制方式。从技术上讲,它又分为离线点控制和在线点控制两种形式。前者采用定时信号配时技术,目前仍然是其他控制方式的配时基础;后者是交通响应控制或车辆感应控制,它是根据交叉口各个人*通流的实际分布情况,合理分配绿灯时间到各个相位,从而满*通需求。
(2)干线交通的协调控制
城市路网中的交通干线承担着很重的交通负荷,保证干线的交通畅通对改善一个地区甚至一个城市的交通状况往往起着至关重要的作用。在城市交通路网中,有时交叉口相距很近,两个相邻的交叉口之间的距离通常不足以使一小队车流在有限时间内完全疏散。单个交叉口分别设置单点信号控制时,车辆经常遇到红灯,时停时开,行车不畅,环境污染严重。为了减少车辆在各个交叉口的停车次数,特别是当干线的车辆比较畅通时,相邻交叉口之间的控制方案宜采用相互协调的控制策略。最初协调信号计时的方法是基于绿波的概念,相邻交叉口执行相同的信号控制周期,主干线相位的绿灯开启时刻错开一定的时间,交叉口的次干线在一定程度上服从主干线的交通。
当一列车队在具有许多交叉口的一条干线上行驶时,协调控制使得车辆在通过干线交叉口时总是在绿灯开始时到达,因而无需停车即可通过交叉口,形成一条交通流的绿波带。绿波控制能有效提高车辆行驶速度和道路通行能力,确保道路畅通,减少车辆在行驶过程中的延误时间和能源消耗。干线交通协调控制的控制参数是周期长度。绿信比和相位差,控制的目标一般是车辆的平均延误和停车次数。干线信号协调控制方法的设计流程图如图1所示。

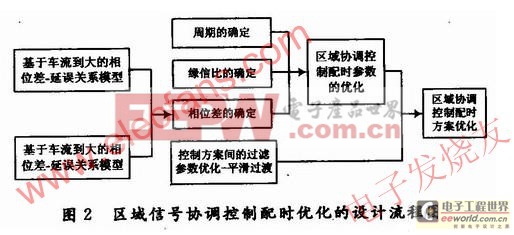
区域交通信号控制的对象是城市或某个区域中所有交叉口的交通信号。随着计算机技术、优化方法、自动控制和车辆检测技术的发展,人们研究把一个城市区域内或一个局部小区内所有交叉口的交通信号联合起来综合加以协调控制,以使得区域内的车辆在通过某些交叉口时所产生的总损失最小。在这种控制方式下,交通信号机将交通量数据实时地通过通信网传至上位机,上位机根据路网交通量的实时变化情况,按一定时间步距不断调整正在执行的配时方案。上位计算机同时控制一个城市区域中的多个交叉路口,实现区域中交叉口之间的统一协调管理,提高路网的运行效率。通过这种控制方式,容易实现交通路网的统一调度与优化管理。区域信号协调控制配时优化的设计如图2所示。
3.2 按控制方式划分
按控制方式可以把城市道路交通控制分为定时控制、感应控制、自适应控制和智能控制几种类型。
(1)定时控制
定时控制方式以历史交通流数据为依据,找出每个日/周和时间段的不同交通流变化规律,用人工方法或计算机仿真等手段预先准备好不同日/周和不同时间区段内使用的配时方案,它属于开环控制,不易根据车流状况实时调整控制方案。由于定时控制对交通信号机的要求低,无需实时交通量的检测,因而仍然是目前城市道路交通系统中应用较为广泛的一种控制策略。
(2)感应控制
感应控制的原理是根据车辆检测器测量的交通流数据调整相应的绿灯时间的长短和时间顺序,以适应交通流的随机变化。这种方式比定时控制有更大的灵活性。
(3)自适应控制
自适应控制是根据检测到的有关道路交通信息,并基于预测模型预测到的未来交通需求,从系统信号配时方案库中选择相应的优化方案,或实时计算产生相应的优化控制方案实现交通自动控制。
(4)智能控制
严格意义上讲,智能控制不仅仅是交通信号的控制,而是整个交通系统的控制,即智能交通系统。智能交通系统是交通控制的最高层次,它将先进的信息技术、数据通讯技术、检测传感技术、自动控制理论、运筹学、人工智能和计算机及其网络等一系列高新技术综合运用于交通运输各个子系统,从而建立起一种大范围、全方位发挥作用的实时、准确、高效的交通运输综合管理体系。智能交通系统把人、车、路和环境等交通运输系统的各个环节有机整合,从而使车、路的运行功能一体化和智能化。智能交通系统是解决交通问题的必由之路,安全、高效、环保、低耗、快捷、舒适的绿色交通是智能交通的发展方向。
4 城市智能交通控制系统设计
智能是一种应用知识对一定环境进行处理的能力,或对目标准则进行衡量的抽象思考能力。另一种定义是在一定环境下针对特定的目的而有效地获取信息、处理信息和利用信息从而成功达到目的的能力。智能交通系统,是利用人工智能的理论和方法,解决交通问题的综合系统。人工智能近年发展的成果,为智能交通系统的研究提供了坚实的理论基础,可以利用这些成果解决传统方法无法解决的问题。这是因为:一方面交通系统是结构复杂、影响因素多、随机性很强的系统,利用数学方法解决交通问题的难度很大,所建立的模型往往过于复杂,难于求解,同时也很难用一种或几种模型来概括交通流系统的多样性。另一方面,交通

tcp/ip相关文章:tcp/ip是什么











评论