Jitter(抖动)
⊙介绍:
这篇文章的焦点是使用户基本的理解什么是jitter以及jitter的发生是由什么引起的,引用的子标题1到7是来自于MJS文档的定义。
请参考Fibre Channel(光纤信道)MJS文档(T11.2/Project 1230/Rev 10 位于ftp://ftp.t11.org/t11/member/fc/jitter_meth/99-151v2.pdf )以获得更详细的信息。
⊙Jitter定义:
“Jitter是来自与一个事件的理想时间的偏差,参考事件是电子事件的微分零点交叉口(differential zero crossing)和光学系统的标称接收门限功率电平。Jitter是由确定性内容和高斯(随机)内容组成的。”
下面部分解释了每一个成分以及它们来自于哪里。
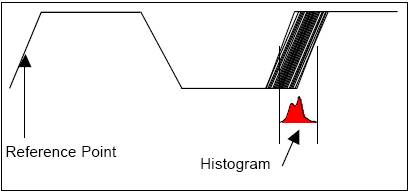
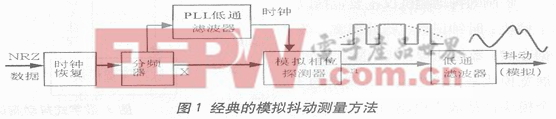
图1:jitter定义
确定性Jitter(DJ)定义
“确定性Jitter是具有一个非高斯概率密度函数的Jitter,确定性jitter总是在幅度上跳跃的并在特定的原因下发生,四种确定性jitter被定义:占空比失真jitter、数据从属jitter、正弦jitter和不相关(对数据)跳跃jitter,DJ的特性由它的跳跃和峰峰值决定。
DJ的形式有几种,时钟信号是典型的易受占空比失真(DCD)和周期Jitter(PJ)的影响的,数据信号也容易受DCD和PJ的影响,还易受符号间干扰(ISI)和数据从属Jitter(DDJ)的影响。不管采样尺寸如何改变,只要充足的数据点被采集以完成每个周期元素的至少一个完全的周期,那么DJ的总量将保持不变。
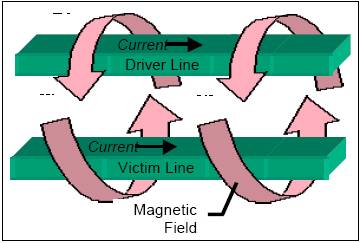
图2:串扰例子
DJ来自于哪里?
DJ是典型的由串扰、EMI、同步开关输出(SSO)、设备功能从属和其它有规律发生的干扰信号引起的,当一根受影响的线(一个电路板上的一根走线或一个电缆中的2根邻近的线)被一根驱动线上产生的磁场影响时,串扰发生。(图2)受影响的导体的感应系数的增加将使感应磁场转换为感应电流,感应电流的累加(正极或负极)将使被影响的线的电流逐渐增加或电压逐渐减小,电压的逐渐减小将在被影响的线上引起jitter。
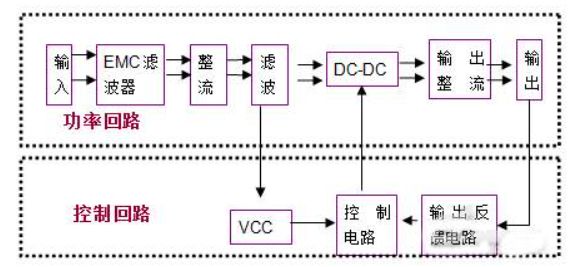
图3总出示了一个EMI辐射图表,一根受影响的线被来自于一个EMI源(开关电源、AC电源线、RF信号源等等)的磁场所影响,这与串扰产生的jitter非常相似,在串扰情况下,一个磁场将感应出一个感应电流,该感应电流(正极或负极)将使被影响的线上的电流增加, 因此在被影响的线上产生jitter。
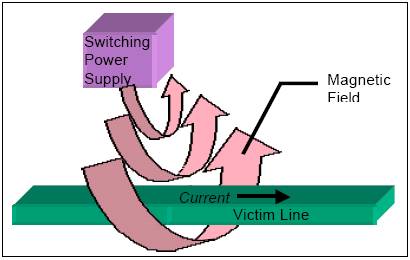
图3:EMI例子
图4出示了一个噪声参考平面的例子,当电源平面的噪声引起下游逻辑门的门限电压的参考改变时,DJ的这种形式发生。这个改变与输入信号的回转率成比例,当Vt在门上被超过,输出晶体管将导通。
当地参考平面在Vt 有一个改变时,这个电压的改变将导致门的开关的超前或滞后,由此产生的时间误差引起jitter。
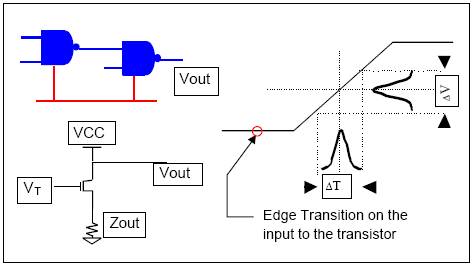
图4:噪声参考平面图表
同步开关输出(SSO)是DJ的另一个来源,一个SSO图表在图5中显示,如果几个输出管脚转换到同一个状态,将在Vcc和GND平面上感应出一个电流尖峰。
这些尖峰电流可以引起门限电压判断点的改变,由于模式的敏感性和由于SSO造成的jitter边缘幅度的跳跃,这被认为是DJ。
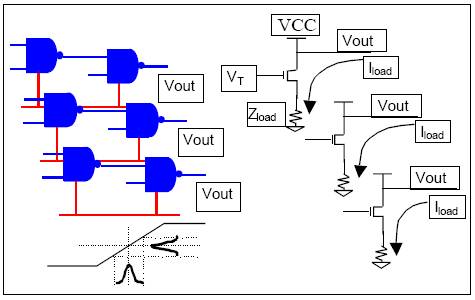
图5:同步开关输出(SSO)图表
下面的四个DJ成分被指定到数据。
符号间干扰(ISI)定义
“数据从属确定性jitter是由信号从比特序列(符号)的不同位置开始并到达接收器门限所必需的时间差异所引起的。例如,当使用那些削弱由交替的0,1,0,1组成的比特序列的峰值幅度比由0,0,0,0,1,1,1,1组成的比特序列的峰值幅度多的媒体时,使用0,1,0,1达到接收器门限所必需的时间比来自于0,0,0,0,1,1,1,1所必需的时间少。4比特序列的运行长度产生一个更高的幅度,这将在比特值改变时花费更多的时间来克服,因此与1比特序列运行长度比较将产生一个时间差。当不同运行长度的比特序列在同一个传输中混合应用时,不同的比特序列(符号)将互相干扰。is expected 无论任何一种具有频率成分的比特序列被传输媒体以不同的速度传输时,ISI将发生。
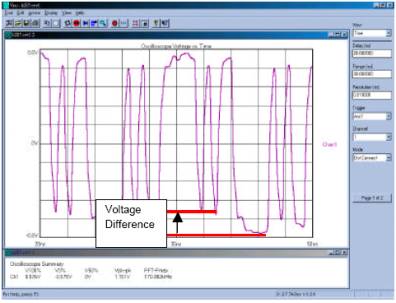
图6:DDJ/ISI例子
数据从属Jitter(DDJ)定义
当传输模式从一个时钟模式改变到一个非时钟模式时,Jitter被产生,包括ISI。
图6出示了一个DDJ/ISI影响一个光纤信道K285模式的例子,在一个1,0,1,0,1,1转换后面跟着5个0。这5个连续的0与1,0,1,0,1,1部分期间立即跳回到1的两个0相比较转变为一个较低的电压。
占空比失真(DCD)定义
在一个时钟(重复的0,1,0,1,….)比特序列中,一个“1”脉冲的平均脉冲宽度与一个“0”脉冲的平均脉冲宽度项比较的差异。DCD是DJ分布的一部分并在理想的接收器门限点被测量。
跳跃的不相关的Jitter定义
确定性jitter由被测信号上的不同的数据所引起。
周期Jitter(PJ)定义
PJ可以量化来自于EMI源的串扰的影响。(邻近的线、电源噪声等等)
RMS Jitter(RMSJ)或随机Jitter(RJ)定义
该Jitter的特性表现为一个高斯分布,随机jitter被定义为峰峰值,该值为一比特误差率(BER)10- e12的高斯分布的标准偏差的14倍。RMS jitter是jitter的均方根或标准偏差,对于一个高斯分布,RMS值为BER 10-e12的峰峰值的1/14。
随机(高斯)jitter在自然界中是随机的,它典型的表现为一个高斯分布的特点,RJ将随着时间继续的增加,这就是为什么随机jitter被提及为极大的原因。
RJ来自于哪里?
象所有的物理现象一样,发生在电子信号中的边缘偏差将包括随机行为的一些水平, 这些成分在自然界中是概率统计的并且可以被一个高斯函数最好的建模,随机jitter是极大的,因此直接的影响长期的可靠性。
随机jitter来自于半导体晶体结构的热震动,由于不规则涂料密度和加工的不规则性,导体原子的热震动和许多小的贡献者(宇宙辐射等等),材料边界小于理想的原子价电子映射(valence electron mapping)。
因为RMS jitter的特性为一个高斯分布,下一部分将描述高斯模型以及它如何被应用到jitter。
介绍高斯分布
要了解jitter的测量,了解高斯分布是非常重要的,因为它关系到概率问题。图7出示了一个理想的高斯分布,描述一个高斯分布的三个基本元素为平均值、标准偏差(1s)和峰峰值。平均值是所有采样值的平均,峰峰值是最大的测量值减去最小的测量值的结果,1s是包括所有测量的68.26%到平均值的一边的窗口,相似的,2s 是包括所有测量的95.4%到平均值的一边的窗口,3s是测量的99.73%,4s是测量的99.99366%等等,直到10s是测量的(100-1.973x10-21)%。标准偏差或1s用于预计来自于平均值的边远测量的发生,在电子学中,知道来自于理想的/指定的位置的边缘偏差的频率是非常重要的,例如,如果你的系统在一个1 GHz(1,000ps)的时钟上不能容忍少于900ps的时钟周期,你就想知道少于的一个周期的概率将是多少。短周期尾部的知识(Knowledge of the short period tail)可以精确的告诉你一个900ps周期出现的频繁程度。
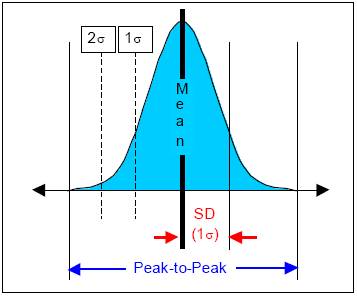
图7:理想的高斯分布
关于这个模型,有几个事情需要注意。首先也是最重要的,标准偏差或1s作为RMS jitter的成分使用只有在纯粹的高斯分布时才是正确的,如果在你的分布中存在任何确定性成分,基于评估发生概率的完全的jitter柱状图的1s使用是不正确的。
其次,在纯高斯数学中,所有可能的测量被假设为可能的,然而对于所有实际的目的,只有当测量的总量不超过1021时,高斯模型在电子学中才能保证结果的正确,这等效于20s(单边)。在20s以后, 高斯模型开始终止测量的可预测性。20s的可靠性相当于一个1 GHz时钟正常操作至少32,150.2年。第三,峰峰值由样本尺寸决定,相同分布的大的样本将有可能产生一个大的峰峰值测量结果,因此,峰峰值必须根据样本数字的前后关系和测量需要的全部时间来讨论。如果一个1 GHz时钟的100个测量结果以每隔25ms测试一个周期被产生,这些样本的统计值比同样的1GHz时钟的100个连续周期的测量更好,100个25ms样本测量完需要2.5ms,而100个连续的测量结果只需100ns,25ms样本的大的总时间窗口给出一个更好的信号完整性统计察看。
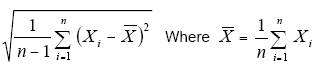
计算标准偏差
下面是标准偏差的计算公式。
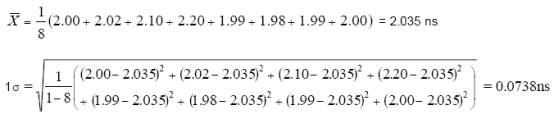
在大多数情况下,时间测量值不是完全的高斯分布的,典型的情况是一些DJ的发生导致一个非高斯的分布。
图8出示了一个带有DJ的并且不是完全的高斯分布的分布例子。但是,区域的尾部Ltail(红色实线区域)和Rtail(蓝色实线区域)在本质上仍然表现为高斯分布,如果并且只能如果尾部区域的等效1s可以被计算,那么该分布仍可以被假设为高斯分布。
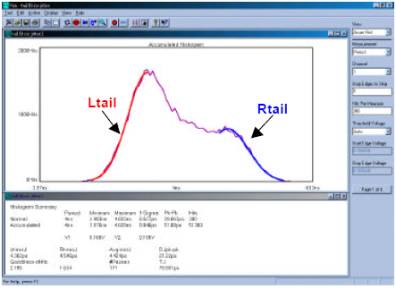
图8:非高斯分布
TailFit运算法则
专利权未定的TailFitTM运算法则使用户能够通过一个带有对称尾部区域的高斯曲线表示一个被评估的非高斯分布,不同的高斯曲线与分布的尾部区域相比对直到一个最佳的匹配被发现为止。然后,匹配曲线的1s(1sL表示左边的)被用作那个特殊尾部的标准偏差乘积因子,这对分布的两边是重复的。注意,匹配的高斯分布对每个尾部不是必须相同的,图9出示了一个右边尾部(Rt-rmsJ)比左边尾部(Lt -rmsJ)具有一个大的1s的例子。一旦左边和右边1s值被建立,总的DJ是适合分布的两个高斯曲线的平均值的差异,根据这个DJ值以及右边和左边1s值,我们可以计算总的jitter时间。在图9中,一个231.953ps的总的jitter在10-e12比特误差率(BER)或在该时钟的1012周期以后被计算。
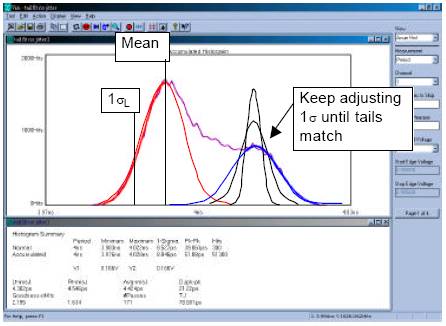
图9:TailFit?运算法则
Jitter调制
图10出示了jitter调制在一个同步系统上的影响,在这个图表中有三个信号,第一个信号是一个理想的没有jitter的时钟,第二个信号是一个正在被调制的时钟,第三个信号是调制函数。当调制信号为高时,它将增加被作用时钟的周期的长度。
当调制信号为低时,它将减小被作用时钟的周期的长度。注意,如果你测量11个周期(调制周期),你将对理想的时钟和jitter时钟得到相同的测量结果。这是一个周期性Jitter(PJ)的例子。
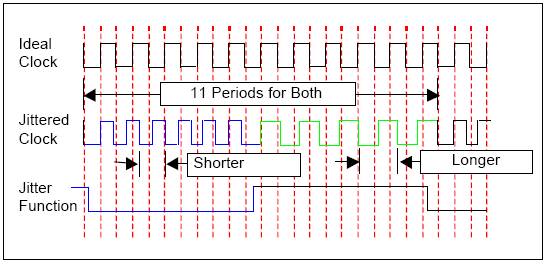
图10:Jitter调制结果
图11出示了一个jitter组成的分类细目,它是这篇论文的要点。
概要:
Jitter由许多元素组成,因为随机jitter是极大的,因此你必须量化你的jitter指标,通过使用TailFitTM运算法则将全部的jitter分类细化为它的基本组成部分:确定性jitter和随机性jitter,我们可以及时的计划出并在一个想要的BER或时间得到一个全部的jitter数,从而对jitter进行量化。
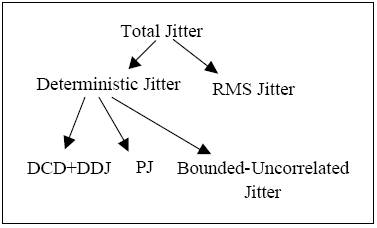
图11:jitter组成的分类细目图表


评论