前视声纳系统成像视觉改进与实现

作者 窦法旺 夏伟杰 金雪 南京航空航天大学 电子信息工程学院(南京 211106)
本文引用地址:https://www.eepw.com.cn/article/201703/345945.htm*基金项目:2014年江苏省产学研联合创新资金资助(BY2014003-14)
窦法旺(1991-),男,研究生,研究方向:信息获取与处理;夏伟杰,男,副教授,研究方向:雷达与声纳信号处理;金雪,女,研究生,研究方向:信息获取与处理。
摘要:视觉效果良好的声纳图像可以更加清晰地呈现水下场景,是目标定位与识别的重要依据。本文在多波束扫描成像模型的基础上,分析了影响前视声纳系统成像视觉的主要因素,并对系统进行了优化与实现。通道幅相校正改善了成像波束的指向性能,使得图像显示地更加均匀细腻;成像波束优化采用二阶锥规划方法设计了接收波束;动态范围优化采用开方处理,在保证灰度等级的同时,增强了图像细节信息的显示效果;扇形视图转换使得图像切合实际场景,更加符合人类的视觉感官,大大提升了用户体验。最后通过对复杂场景的成像测试验证了图像视觉效果改进方法的有效性。
引言
成像声纳系统作为水下探测器的主要感官,担负着发现前方目标,对目标成像、定位、识别和跟踪的任务,所起的作用相当于人的视觉部分,故也称其为声视觉系统[1]。获得视觉效果良好的水下声学图像是声纳系统高效完成任务的重要保障。目前水下导航常采用的是前视声纳系统,它的优点是采用多波束电子预成、成像速度快、探测效率高[2]。但是由于系统软硬件实现时存在的缺陷,以及成像算法与图像显示方法的局限性,声纳图像的视觉效果往往并不理想。本文基于课题组研发的一款多波束前视声纳系统,着重分析了影响系统成像效果的几大因素[3],并进行了优化与实现,主要包括通道幅相校正、波束优化设计、动态范围优化与扇形视图转化等。经过改进后的声纳系统成像质量更高,能够实现对复杂场景的高精度成像。

1 声纳系统的总体结构
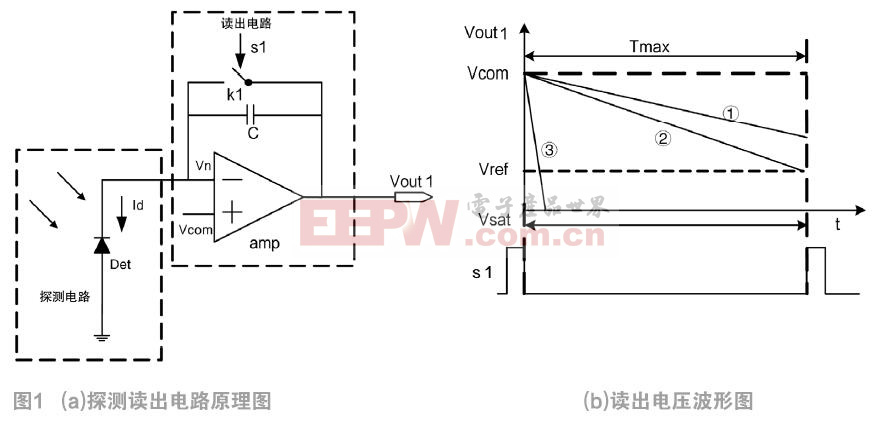
前视声纳系统[4]主要由半圆形的换能器阵列、信号调理与采集模块、信号处理与传输模块、终端显控软件与系统电源等五大部分组成。相对于传统的单波束机械扫描的方式,系统采用了多波束电子预成的成像方案,利用180阵元的半圆形阵列子孔径旋转的方式[5]形成多波束,即用1到91号阵元形成1到6号波束,2到92号阵元形成7到12号波束,以此类推,子孔径旋转90次之后,仅用6组加权系数即可形成540个波束,有效降低了对硬件实现时对加权系数的存储需求。系统工作时,首先根据显控软件下发的控制指令,对发射接收声基阵进行控制,其次回波信号经过调理采集后,送到数字信号处理模块,在V6 FPGA中完成波束形成,然后将形成的波束数据通过V5 FPGA控制的千兆网上传至终端,最后在显控软件上进行实时图像显示,系统工作流程如图1所示。
2 成像视觉效果改进
本文基于的前视声纳系统采用数字多波束形成技术,在90度的视野范围内形成540个窄波束,实现对水下目标的探测与成像。信号处理与传输模块采用基于FPGA的实现架构,幅相校正、成像波束优化和图像数据的动态范围优化均在该模块中完成,矩形视图到扇形视图的转换在终端显控软件中完成。
2.1 幅相误差校正
在数字波束形成算法中主要是对各个通道信号进行幅度加权和相位补偿[6],生成加权系数时,通常假设各个通道的信号具有一致的幅度和相位特性。但是在实际情况中,由于换能器制作工艺的限制以及芯片老化和热效应的影响[7],实际的信号通道模型往往存在不同程度的幅相误差,从而导致系统成像质量的下降。
为了解决多通道之间的幅相不一致性问题,对180路的调理采集通道进行了幅相校正。实验时,使用信号发生器产生频率为450kHz的正弦波信号,同时输入到180路调理通道中,并在软件端录取原始数据,然后计算出各通道的幅相校正系数。系统工作时,通过终端显控软件下发给信号处理模块的V6 FPGA,在滤波抽取之后,对各个通道的实虚部数据分别进行校正。校正系数的计算主要是对采集到的原始数据做256点快速傅立叶变换,得到各通道的幅度和初始相位信息。将第一通道作为参考通道,其他各个通道的幅度差与相位差分别为:

图2所示为幅相校正前后的显示画面,可以看出各调理通道经过幅相校正之后,画面显示更为均匀细腻,图像的视觉效果得到了明显的改善。

2.2 波束优化设计
成像分辨率是前视声纳系统的重要指标,在设计波束的时候总期望得到窄主瓣的同时又可以得到低旁瓣,但是在阵列孔径和工作频率一定的情况下,两者是相互矛盾的。为了满足半圆形阵列的高精度成像要求,本文给出了设计兼顾波束各项性能的最优权值的方法。首先,计算得到包含精确延时信息的导向矢量 ,则波束的空间指向性函数为;其次,将波束优化设计问题看作多目标优化问题,并转化为二阶锥规划[8](Second-order Cone Programming, SOCP)的标准形式;最后利用基于MATLAB的SeDuMi工具箱求解,得到适于成像的最优加权。波束方向图的综合设计主要包括波束指向的控制、主瓣宽度约束、旁瓣等级约束、零陷约束、权值范数约束等,波束优化的统一表达式为:
,则波束的空间指向性函数为;其次,将波束优化设计问题看作多目标优化问题,并转化为二阶锥规划[8](Second-order Cone Programming, SOCP)的标准形式;最后利用基于MATLAB的SeDuMi工具箱求解,得到适于成像的最优加权。波束方向图的综合设计主要包括波束指向的控制、主瓣宽度约束、旁瓣等级约束、零陷约束、权值范数约束等,波束优化的统一表达式为:
其中θ0为波束预成方向,θML为波束主瓣方向,θSL为波束旁瓣方位,θNL为波束零陷方位,d(θML)为期望波束的主瓣,为附加的约束。
不失一般性,这里仅对远场条件下的波束设计进行实验仿真。图3(a)对比了均匀加权、余弦平方加权、切比雪夫加权和SOCP设计的最优加权情况下的波束方向图,可以看出,通过SOCP方法设计的加权具有完全的等旁瓣控制能力,有利于得到一致性很好的波束。图3(b)给出了通过SOCP方法设计的具有不同主旁瓣性能的波束方向图,波束的旁瓣等级分别为-20dB、-30dB、-40dB、-50dB、-60dB。仿真结果表明,通过调整约束条件,SOCP设计方法具有灵活的旁瓣等级控制能力,为探索图像质量与波束主旁瓣性能之间的关系提供了可能。

2.3 动态范围优化
为了保证显示的图像有合适亮度和对比度,同时兼顾到实现时的计算复杂度和显示设备的实际需求[9],需要将波束形成之后的16比特高精度数据压缩到8比特宽度。如何将16位的波束数据映射到8位灰度等级成为解决画面动态范围的关键问题,本文测试比较了截取和开方两种映射方法。测试发现截取方法[10]不仅增加了用户的操作复杂度,而且存在明显的缺点,即在观测微小信号的同时,大信号会出现饱和的现象,产生画面模糊。而开方运算可以更连贯地表示数据的变化,可以得到256个完整的灰度值,具有更强的信号表达能力,所以能够最大程度的保留画面的细节。
图4给出了截取处理和开方处理在水池中对圆环测试的结果,可以看出开方处理后的画面显示的稳定性提高了不少,无需反复调整截取位就可以得到圆环的声学画面,细节刻画也很丰富,即使悬挂圆环的两根细绳也能够被清晰的显示出来,效果改善非常明显。

2.4 扇形视图转换
终端软件显示的图像数据是波束形成后得到的,每个距离单元上有540个波束,距离分辨率为2.5cm,系统的最大工作距离为100m,如果把所有的图像数据直接显示出来,就有将近4000行数据,实际的显示设备显然不满足需求,所以需要对原始的图像数据做缩放处理。此外,声纳系统的探测范围实际上是一个扇形区域,如果将图像数据直接在屏幕上显示时,画面为一个矩形图像,虽然可以清晰地看出目标位置,但是不符合人们的观察习惯,所以需要把图像数据从极坐标转换到直角坐标,做矩形视图到扇形视图的转换。实现时将扇形中的每一个点映射到矩形图像中的点,在扇形区域中,每一个点都对应一个角度和距离,所以在矩形图中都能找到一个对应的点。图5比较了矩形和扇形视图两种图像数据的显示结果,不难发现扇形显示的图像更加切合实际场景,符合人类的视觉感官,可以大大提升用户的视觉体验。

3 测试结果与分析
为了验证上述几种改进方法的有效性,在消声水池和千岛湖对声纳系统进行了成像测试。根据声纳的技术指标,测试选择成像波束的旁瓣等级为-30dB。在消声水池分别对悬挂的圆环和三角架等目标的进行成像,得到轮廓清晰和特征明显的目标图像,如图6(a)所示。在千岛湖对水下潜水员进行实时扫描成像,可以得到连续清晰的潜水员运动画面,图6(b)所示。对堤坝的水下阶梯进行成像,得到了纹理清晰的阶梯图像,如图6(c)所示。高质量的实测声纳图像进一步验证了声纳系统成像视觉改进方法的有效性和实用性。

4 结论
本文基于课题组研发的一款前视声纳系统,在多波束电子扫描成像的基础上,对影响系统成像性能的因素进行了详细分析,并给出了四个改进成像视觉效果的有效途径,通道幅相校正、波束优化设计、动态范围优化和扇形视图转换。最后通过对不同探测场景的成像实现证明了本文改进方法的有效性,改进后的成像效果得到了明显的改善,达到了系统优化的预期目标。
参考文献:
[1]石红.声纳图像处理关键技术研究[D].哈尔滨工程大学, 2011.
[2]Chen P, Tian X, Chen Y. Optimization of the digital near-field beam forming for underwater 3-D sonar imaging system[J]. Instrumentation and Measurement, IEEE Transactions on, 2010, 59(2): 415-424.
[3]董琎琎,周建江,夏伟杰,等.成像声纳动态聚焦算法研究与FPGA实现[J].单片机与嵌入式系统应用, 2015, 15(4):27-30.
[4]杨成.多波束成像声纳系统硬件平台设计与实现[D].南京航空航天大学, 2013.
[5]夏伟杰,周建江,于政,等.一种多波束形成方法及使用该方法的多波束声纳[J].海洋测绘, 2014-03-12
[6]李海森,鲁东,周天.基于FPGA的多波束实时动态聚焦波束形成方法[J].振动与冲击, 2014(3):83-88.
[7]袁龙涛.相控阵三维摄像声纳系统信号处理关键技术研究[D].浙江大学, 2013.
[8]陈鹏,马晓川,闫晟,等.基于二阶锥规划的非均匀线列阵优化波束形成[J].电声技术, 2008, 32(4): 39-43.
[9]董琎琎,窦法旺,夏伟杰,等.声纳图像动态范围扩展与FPGA实现[J].电子产品世界, 2015(5):34-36.
[10]黄慧.多波束成像声纳信号处理机的设计与FPGA实现[D].南京航空航天大学, 2013.
[11]Cruza J F, Camacho J, Serrano-Iribarnegaray L, et al. New method for real-time dynamic focusing through interfaces[J]. Ultrasonics, Ferroelectrics, and Frequency Control, IEEE Transactions on, 2013, 60(4): 739-751.
本文来源于《电子产品世界》2017年第4期第60页,欢迎您写论文时引用,并注明出处。




评论