CAN总线通信硬件原理图(采用TJA1050T CAN总线驱

CAN总线通信硬件原理图(采用TJA1050T CAN总线驱动器)
F040中内置CAN总线协议控制器,只要外接总线驱动芯片和适当的抗干扰电路就可以很方便地建立一个CAN总线智能测控节点。本设计中采用PHILIP公司的TJA1050T CAN总线驱动器。
CAN总线通信硬件原理图如图3所示。
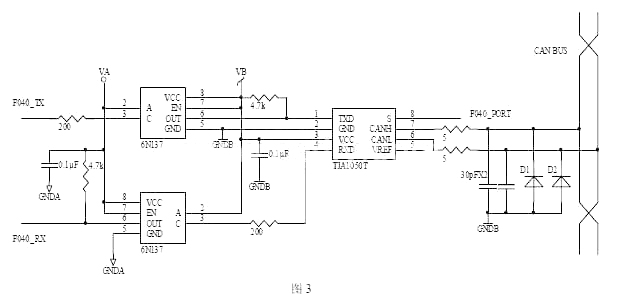
图中F040 的CAN信号接收引脚RX和发送引脚TX并不直接连接到TJA1050T的RXD和TXD端,而是经由高速光耦6N137进行连接,这样做的目的是为了实现CAN总线各节点的电气隔离。为了实现真正意义上完全的电气隔离,光耦部分的VA和VB必须通过DC-DC模块或者是带有多个隔离输出的开关电源模块进行隔离。为防止过流冲击,TJA1050T的CANH和CANL引脚各通过一个5Ω的电阻连接到总线上。并在CANH和CANL脚与地之间并联2个30P的电容, 用于滤除总线上高频干扰。而防雷击管D1和D2可以起到发生瞬变干扰时的保护作用。
TJA1050T的8脚连接到F040的一个端口用于模式选择,TJA1050T有两种工作模式用于选择,高速模式和静音模式。TJA1050T正常工作在高速模式,而在静音模式下,TJA1050T的发送器被禁能,执行只听功能,可用于防止由于CAN控制器失控而造成的网络阻塞。






评论