基于STC89C52单片机的智能小车的设计
0 引言
本文引用地址:http://www.eepw.com.cn/article/201610/309907.htm自第一台工业机器人诞生以来,机器人的发展已经遍及机械、电子、冶金、交通、宇航、国防、探索等领域。近年来机器人的智能水平不断提高,并迅速改变着人们的生活方式。人们在不断探索、改造、认识自然的过程中,制造能代替人劳动的机器人,一直是人类的梦想。智能小车,也就是轮式机器人,最适合在那些人类无法工作的环境中工作,该技术可应用于无人驾驶机动车、无人生产线、仓库等领域。小车也可以作为玩具的发展对象,为中国玩具市场技术含量的缺乏进行一定的弥补,实现经济收益,形成商业价值。
本设计完成以由单片机最小系统、红外遥控、智能寻迹、自动避障以及液晶显示组成的硬件模块,结合软件设计组成多功能智能小车,共同实现小车的前进、倒退、转向行驶,根据地面黑线智能寻迹,检测障碍物后转向等功能,实现智能控制。
1 智能小车硬件系统设计
小车的硬件系统主要由控制系统、驱动系统、遥控系统、寻迹系统、避障系统、显示系统和供电系统组成。
1.1 控制系统
选用具有内部看门狗的宏晶系列STC89C52RC单片机作为核心控制器件,最小系统包括单片机、MAX232串口通信电路、复位电路、上拉电阻和晶振电路(晶振为12MHz)。
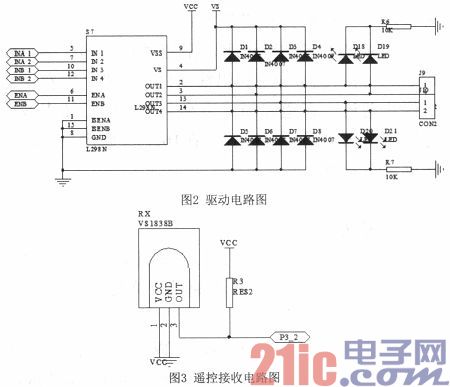
1.2 驱动系统
本小车采用四轮驱动,驱动电机的控制由L298N来实现。L298N内部包含4通道逻辑驱动电路,可驱动46V、2A以下的2个电机。由L298N构成的PWM功率放大器的工作形式为单极可逆模式,2个H桥的下侧桥晶体管发射极连在一起。根据L298N的输入输出关系,使控制端ENA接高电平时,通过PWM信号输入端IN1和IN2可以控制电动机的正反转(输入端IN1为PWM信号,输入端IN2为低电平,电动机正转;输入端IN2为PWM信号,输入端IN1为低电平,电动机反转);当控制端ENA为低电平时,驱动桥路上的4个晶体管全部截止,使正在运行的电动机电枢电流反向,电动机停止。
电动机的转速由单片机调节PWM信号的占空比来实现。PWM即脉冲宽度调制,它是指将输出信号的基本周期固定,通过调整基本周期内工作周期的大小来控制输出功率的方法。占空比是指高电平持续时间在一个周期时间内的百分比。控制电机的转速时,占空比越大,速度越快,如果全为高电平,占空比为100%,速度达到最快。




评论