GPS与北斗二代双频接收机低噪放模块设计实现

摘要 设计并实现了一款覆盖GPS L1波段和北斗二代B1波段的低噪放模块。该模块中的低噪声放大器使用分立元件搭建,匹配电路调试灵活,满足了模块对输入输出驻波的高要求。测试结果表明,低噪放模块增益为26 dB,带内增益平坦,输入输出驻波1.5,噪声系数2 dB,带外抑制度80 dBc,输出1 dB压缩点8dBm,满足了导航系统接收机前端对低噪放模块的要求。
本文引用地址:https://www.eepw.com.cn/article/201610/306476.htm全球定位系统(GPS)是20世纪70年代由美国陆、海、空3军联合研制的新一代空间卫星导航定位系统,其主要目的是为陆、海、空3大领域提供实时、全天候和全球性的导航服务。北斗导航系统是我国自主研发、拥有独立知识产权的全球卫星导航系统。根据全球卫星导航系统的定位原理及卫星信号特征,为实现接收机快速、连续、精确定位,多个卫星导航系统组合使用是未来发展的趋势。本文就GPS和北斗二代导航系统在接收机前端的组合应用进行了探索。
低噪放模块的主要功能是将天线所接收到的射频信号进行低噪声放大,滤波后输出至接收机。本文设计实现了一款覆盖GPS L1波段(1 575.42±1.023 MHz)和北斗二代B1波段(1 561.098±2.046 MHz)的低噪放模块,其具有输入输出驻波小、增益高、噪声系数小、带外抑制度高、输出1 dB压缩点高等优点,可用于导航系统的接收机前端。
1 概述
本方案的低噪放模块主要由带通滤波器、低噪声放大器和衰减器等组成,总体框图如图1所示。
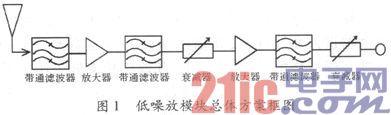
对于模块设计,低噪声放大器一般选取集成芯片;在增益、噪声系数等指标上,单片低噪声放大器比分立元件有较大优势。但由于本模块对输入输出驻波要求较高,而集成芯片的驻波难以调试,所以选用分立元件搭建低噪声放大器。第一级带通滤波器选用介质滤波器。介质滤波器可滤除系统不需要的频段,也可承受较大的功率,能够用来保护低噪声放大器免受大功率输入信号的烧毁。第二级和第三级带通滤波器选用声表面波滤波器,以提高模块的带外抑制度。衰减器用于调节模块的增益。
2 低噪声放大器的设计
在射频微波晶体管放大器的设计中,需着重考虑的是电路的稳定性、功率增益、工作带宽、噪声和直流偏置。而对于低噪声放大器,通常情况下设计的目标是最小的噪声系数。由于最小噪声系数和最大功率增益不能同时得到,所以需在噪声和增益之间做出折中考虑。
2.1 放大器的稳定性
稳定性是射频放大器设计需要考虑的重要因素,假如放大器的输入或输出端口阻抗中有负实部,则该电路可能发生振荡,所以必须对放大器进行稳定性检验。判断放大器稳定性的方法有稳定性圆法,K-△法,单μ法。本文使用K-△法,具体判定公式为
其中,△=S11S22-S17S21。若K>1且△1,则放大器是无条件稳定的;否则,放大器就有可能发生振荡。
2.2 低噪声指标的实现
噪声系数的基本定义是放大器输入和输出信噪比的比值。噪声系数是低噪声放大器的重要指标。对于单级放大器而言,噪声系数可表示为
其中,Fmin是晶体管的最小噪声系数;Γopt是获取最小噪声系数Fmin的源反射系数;rn是归一化噪声电阻。这3个参数均为晶体管的噪声参数。Γs为实际放大器的源反射系数;Fmin是晶体管工作电流和频率的函数,对于每个Fmin只有一个Γopt与之对应。
2.3 放大器的1 dB压缩点
1 dB压缩点是表征放大器线性度的一个量,放大器有一个线性动态范围,在该范围内,放大器的输出功率随输入功率线性增加。随着输入功率的继续增大,放大器进入非线性区,其输出功率不再随输入功率的增加而线性增加,通常情况下,其输出功率低于小信号增益所预计的值。通常将增益下降到比线性增益低1 dB时的输出功率值定义为输出功率的1 dB压缩点。而对于模块或系统,1dB压缩点表征的是模块或系统的线性度。
2.4 低噪声放大器的仿真
为设计一款用于GPS L1波段和北斗二代B1波段的低噪声放大器,文中选用Avago公司的ATF54143晶体管,其增益高、噪声小。利用ADS(Advanced Design System)软件,并对放大器的直流偏置电路进行设计,对放大器的增益、噪声系数和驻波进行仿真优化。
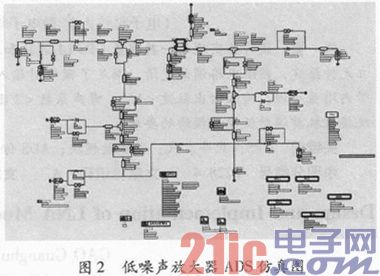
设计时,源极串联电感作为负反馈,用于增加放大器的稳定性和控制增益及增益平坦度。由于电感值较小,因此利用一段短路微带线实现,这样做简单方便,且成本低、易于调试。在微波射频频段,元器件的寄生效应明显,所以仿真电路时,需考虑主要电路的焊盘分布参数、金属孔化、不连续节点和电感电容元件的寄生效应等。在保证增益和输入输出驻波的前提下,使用最小噪声匹配,使放大器的噪声系数尽可能小。整个低噪声放大器的仿真电路如图2所示。
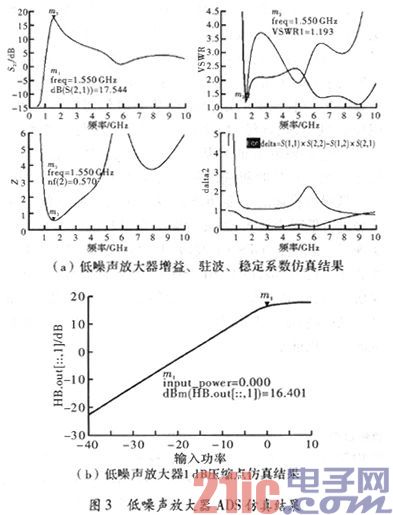
放大器的仿真结果如图3所示。由图3(a)可看出,在7 GHz以下,稳定系数K>1且△1,这说明在7 GHz以下,放大器均无条件稳定;在L1波段(1 575.42±1.023 MHz)和B1波段(1 561.098±2.046 MHz),放大器的增益约为17 dB,噪声系数约为0.6 dB,输入驻波在1.2以下,输出驻波在1.4以下,满足低噪放模块中对低噪声放大器的指标要求。从图3(b)可看出,单个低噪声放大器的输入1 dB压缩点为0 dBm,输出1 dB压缩点为16.4 dBm。
3 模块设计
3.1 模块增益设计
在本方案中,为保证输入输出驻波的可调性,两级低噪声放大器均使用晶体管搭建,增益约为17 dB。两级放大器共提供34 dB增益,3个滤波器的插损之和约为3 dB,故模块的增益可达约31 dB。模块的增益仍可由衰减器进行调整。
3.2 模块噪声设计
对于模块的噪声设计,需使用系统或模块的噪声系数级联公式
由噪声系数级联公式可知,在接收机中,第一级滤波器和第一级放大器的噪声系数对模块或系统的影响较大,所以第一级放大器一般做最低噪声匹配。由图3可知,所设计的低噪声放大器噪声系数约为0.6 dB。由于电容电感的寄生电阻的影响和微带线及PCB板的电磁损耗,实际做出的放大器噪声系数会恶化。假设实际做出的放大器噪声系数和介质滤波器噪声系数均为0.8 dB,两级声表面波滤波器噪声系数分别为1.1 dB,第一级衰减器2 dB,第二级衰减器4 dB,则根据系统级联噪声系数计算公式,整个模块总噪声系数为1.71 dB。
4 测试及结果分析
将模块的滤波器、放大器和衰减器装配完成后,最终测试结果如图4所示。
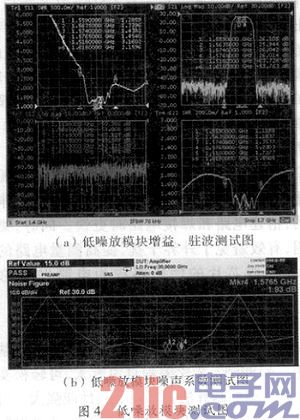
由图4(a)可看出,在1.559~1 576 MHz内,低噪放模块增益约为26 dB,带内纹波0.5 dB以内,输入输出驻波均在1.5以下;在1568± 50 MHz时,带外抑制为80 dBc。由图4(b)可看出,低噪放模块的噪声系数约为2.0 dB。
对于噪声系数,测试结果相比仿真结果高出0.3 dB,一方面可能是因为第一级介质滤波器的插入损耗过大,另一方面可能是因实际制作的低噪声放大器的匹配电路引入了过多的寄生损耗,导致放大器噪声系数增加。
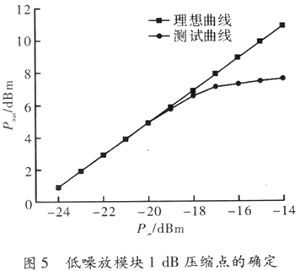
为确定低噪放模块的1 dB压缩点,在中心频点1 568 MHz处,测得低噪放模块的输入输出功率,将数据用Origin软件作图如图5所示。由图5可知,低噪放模块的输出1 dB压缩点约在8 dBm。
5 结束语
本文设计并实现了一款覆盖GPS L1波段和北斗二代B1波段的低噪放模块。该模块中的低噪声放大器使用分立元件搭建,便于对输入输出驻波进行灵活调试。最终测试结果表明,低噪放模块增益为26 dB,带内增益平坦,输入输出驻波比1.5,噪声系数2 dB,带外抑制度80 dBc,输出1 dB压缩点8 dBm,满足导航系统接收机前端对低噪放模块的要求。













评论