关于晶振及其典型应用的探讨

一、晶振介绍
石英晶振是石英晶体谐振器和石英晶体时钟振荡器的统称,它是一种用于稳定频率和选择频率的电子元件,可分无源晶振和有源晶振两种类型。
(1) 无源晶振为Crystal(晶体)。
其必须借助外部的有源激励和振荡电路才能起振,振荡频率主要取决于晶体的切割方式,外部振荡电路也部分影响着振荡频率的精度。振荡电路中包含两个Trim电容,由于电容的精度一般比较低,因此即便是完全相同的电路图,振荡频率的频偏也可能存在一定的差别。
(2) 有源晶振Oscollator(振荡器)
它是将振荡电路和晶体集成在一个封装内,加电即可输出时钟信号,频率精度较高,价格也略高。
常用的晶振的技术指标如下:
(1) 基准频率:晶振在完全理想条件下的振荡频率。
(2) 工作电压:晶振的工作需要外部提供一定的电源电压,晶振输出的时钟信号上的噪声与电源再说紧密相关,因此在晶振器件资料上,对电源的质量有一定的要求。
(3) 输出电平:晶振与晶体相比,最为突出的一点就是只要上电,就直接输出时钟信号。时钟信号的电平也多种多样,支持的电平主要包括:TTL、CMOS、HCMOS、LVCOMS、LVPECL、LVDS等。在选型中,应根据所需时钟电平的种类选择相应的晶振。
(4) 工作温度范围:根据环境温度要求的不同,应选择对应的工作温度范围。
(5) 频率精度:对应不同的工作温度范围,可选择不同的频率精度。以±15ppm@-20~70℃为例,其含义是,在-20~70℃温度范围内,该晶振输出频率相对基准频率的偏差不会超过15ppm。该参数是晶振的重要参数,包含了由于温度变化、电源电压波动、负载变化等因素引起的频率偏差。
(6) 老化度:在恒定的外接条件下测量晶振频率,频率精度与时间之间的关系。
(7) 启动时间:从上电到晶振输出频率的偏差达到规定的频率精度所需要的时间。
(8) 时钟抖动(Jitter):在后面内容详细介绍。
(9) 相位噪声:在后面内容详细介绍。
有源晶振的类型包括以下几类:
(1) 普通封装晶体振荡器(SPXO)
它无温度补偿功能,也无电压控制功能,其频率特性完全取决于晶体以及外部振荡电路。标准频率为1~100MHz,频率精度最高可达±10ppm。由于SPXO不包含任何频率补偿功能,因此是晶振中精度最差的一个种类,价格低廉,通常作为微处理器的时钟器件。在PCB布局时,SPXO器件应远离发热源。
(2) 压控式晶体振荡器(VCXO)
VCXO是通过外部施加控制电压时振荡频率可调的晶体振荡器。它的特点:输出频率可以通过输入电压控制,一般控制范围为±50~±200ppm。工作原理:通过改变外加调整电压的大小,能改变容性负载CL的值,从而实现频率的调整。由于VCXO的具有振荡频率可调整的特点,所以用频率—温度稳定度来定义环境温度变化对频偏的影响。由于VCXO不具备温度补偿功能,因此在PCB布局时,VCXO器件应远离发热源。VCXO除了电源电源外,还需要控制电压,以调整输出频率,当控制电压调整为中央电压时,VCXO输出标称的基准频率。VCXO常用在锁相环电路中。
(3) 温度补偿晶体振荡器(TCXO)
TCXO是利用附件的温度补偿电路以减少环境温度对振荡频率的影响,其特点是频率精度远远高于SPXO和VCXO。工作原理:利用热敏电阻的温度敏感性,当温度变化时,热敏电阻的阻值和容性负载同时发生变化,而容性负载的变化会改变振荡频率,从而实现对振荡频率的修正。
(4) 恒温晶体振荡器(OCXO)
将晶体和振荡电路置于恒温箱中,以消除环境温度变化对频率的影响。频率精度为10-10~10-8量级。频率稳定度在四种类型振荡器中最高。
不同的特性决定了四种类型晶振的应用场合:如果需要设备即开即用,需选用SPXO、VCXO和TCXO。OCXO晶振需要一定的稳定时间。如果要求时钟信号较高的稳定度,推荐使用TCXO和OCXO。
二、两个重要概念:时钟抖动与相位噪声。
数字信号的各个有效边沿相对于其理想位置都存在一定的偏离,对于其中的短期性偏离(频率在10Hz以上的偏离),使用时钟抖动和相位噪声参数来定义;对于其中的长期性偏离(频率在10Hz以内的偏离),使用漂移来定义。其中漂移容易被CDR(Clock Data Recovery,时钟数据恢复电路)等模块滤除。时钟信号的质量通常用抖动和相位噪声来描述。时钟抖动和相位噪声的区别在于:时钟抖动是时域的概念;相位噪声是频域的概念。时钟抖动通常分为时间间隔误差(Time Interval Error,简称TIE)、周期抖动和相邻周期抖动。以下重点讨论周期抖动和相位噪声的关系。
1、时钟抖动
周期抖动(JPER)是实测周期与理想周期之间的时间差。由于具有随机分布的特点,可以用峰-峰值或均方根(RMS)描述。首先定义门限VTH的时钟上升沿位于时域的TPER(n),其中n是一个时域系统,如图1所示。JPER表示为:
其中T0是理想时钟周期。由于时钟频率固定,随机抖动JPER的均值应该为零,JPER的RMS可表示为:
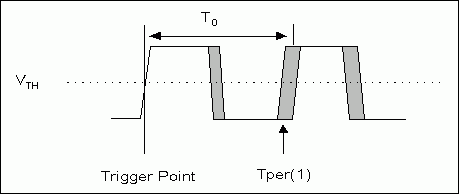
图1 周期抖动测量
利用示波器的边沿触发和余辉功能,可以粗略的测量信号的抖动。使用该方法的测量并不具有实际意义。原因:(1)随着测量时间的增加,测得的抖动值将不断增加,即利用这种测量方法,无法得到确定的抖动值;(2)即使能得到确定的抖动值,这样的值对电路设计也没有任何指导意义,只能粗略判断所使用的晶振的抖动情况。


评论