基于三维加速度传感器的跌倒检测模块的设计

随着社会老龄化的不断发展,预期到2030年空巢老年人家庭的比例将达到90%,届时我国老年人家庭将空巢化。据统计,在65岁以上的老年人群中,每年有超过1/3的人都有跌倒经历,2/3老年人意外死亡都是由跌倒引起的,而在75岁以上老人中这个比例更是高达70%。
本文引用地址:https://www.eepw.com.cn/article/199550.htm跌倒检测是远程健康监护系统中家庭终端的一种实现方式,涉及多个领域,包括信号采集与处理,信号特征提取,数据传输等方面的研究。
跌倒检测技术有很多,从信号获取的渠道进行分类,可将跌倒检测技术分为三类:基于视频图像的跌倒检测,该方法不足之处在于它不能保证用户的隐私安全并且视频图像的质量受光线等环境影响较大;基于声学信号的跌倒检测,安装复杂且前期投入比较大;基于穿戴式装置的跌倒检测,较之前两种方法在适用环境上和对用户的干扰程度上有比较突出的优点。综合比较各类检测方法,基于穿戴式的检测方法对老年人的健康进行远程监管比较适合。
本文设计了一种佩带在腰部的新型的基于加速度传感数据采集的跌倒检测模块。在数据预处理阶段,本文提出了基于1-class SVM分类预算法,并依据人体在不同动作下其能量损耗的最大量不同(阈值范围不同)进行跌倒判断,在确保系统准确性上增加了计算分析人体特定时间内的速度、位移及倾角这三个特征量作为辅助判据。
1 跌倒检测模块设计
1.1 架构设计
跌倒检测模块的总体架构如图1所示。主要由加速度采集单元、微处理器单元、无线通信单元以及远程跌倒监控后台等构成,整体模块采用锂电池进行。
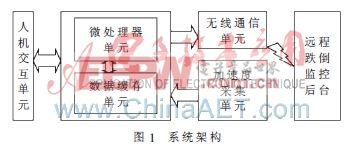
系统由加速度采集单元进行加速度的采集,经微处理器单元对信号进行预处理,经预处理提取的可疑数据通过无线通信单元传输至远程跌倒监控后台进行最终的分析处理,在检测到跌倒时系统能够自动触发警报项。
交互单元主要包括了功能按键、led指示灯和蜂鸣器,其中功能按键为用户提供主动报警和取消误报警的功能,LED指示灯主要用于显示通信网络的连通状态,蜂鸣器在系统检测到跌倒时能得到一个反馈的警报信号。
1.2 信号预处理
首先,采用13阶的中值滤波器来滤除加速度采集装置采样值的噪声,然后采用一个截止频率为0.5 Hz的高通滤波器以及一个0.8 s的非重叠窗叠加来消除重力因素,以便滤出动态加速度信号作为下一步处理准备。
在滤波处理后,对原始数据采取基于1-class SVM的分类算法进行可疑数据的提取。

1-class SVM算法是由SVM算法扩展而来,算法利用核函数将所有样本映射到高维特征空间实现分类。在特征空间里,1-class SVM确定了一个包含所有目标数据的最小超球面体表面,这个表面就是分类器。用一组松弛变量来控制超球体的半径和超出超球体的样本数量。通过此算法可以提取出绝大部分的跌倒性样本(阳性样本)。通过训练后可以获得一组支持向量,然后通过式(6)计算出半径R:
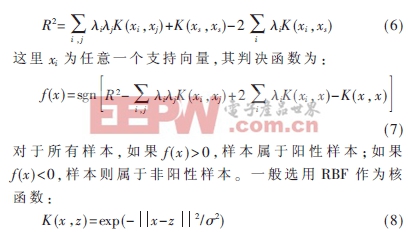
研究表明从低强度日常活动中区分跌倒性行为是非常有效的,但是当从较高强度的日常活动区分跌倒性行为则困难一些。因此该算法只作为数据的预处理过程中使用,从原始数据中分离出可疑数据。通过在实验中调整松弛变量,可确保97%以上的真正跌倒样本数据能够被提取。
2 跌倒检测算法
2.1 动作模型的建立
人体在跌倒过程当中,对象在各个方向上的加速度、速度和位移这三个矢量均会发生变化。实际上,如果仅根据各方向上的加速度的变化很难全面地分辨出跌倒动作。通过对加速在时间域上进行一次积分求取速度(v),两次积分求取位移(s),以提高系统的准确性。
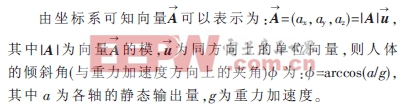
通过加速度传感器采集到的加速度包含受到的地球重力加速度和人体运动引起的加速度这两部分,并且任何时刻这两部分都同时存在。以人体运动加速度为依据建立起人体三维动作模型,根据加速度传感器的三个正交的测量方向可以建立三维坐标系,如图2所示。

通常正确佩戴好装置后,对象在处于静止或是水平匀速运动状态下时,Y方向的加速度表现为重力加速度(g),水平方向上的加速度为0。当对象发生跌倒时,如果只考虑始末状态的加速度值的变化,纵向的变化范围从1 g~0 g,而水平方向分量(x或z)的变化则是0 g~1 g。
2.2 算法设计
依据人体在行走、站立和跌倒所损耗的能量的不同,通过实验可以得出在不同动作下其能量损耗的阈值范围。因此在后台的数据分析方法上提出了引入能量损耗的方法进行分析。能量损耗是动态加速度的平方在特定时间域上的积分,其表达如公式(9)示:

本文a=1,能量损耗的计算以每个采样窗体为单位进行。
针对老年人的生活状况特点进行分析,并结合实际设计了相应的跌倒检测算法。算法流程如图3所示,流程图从整体上描述了跌倒检测判断的过程。
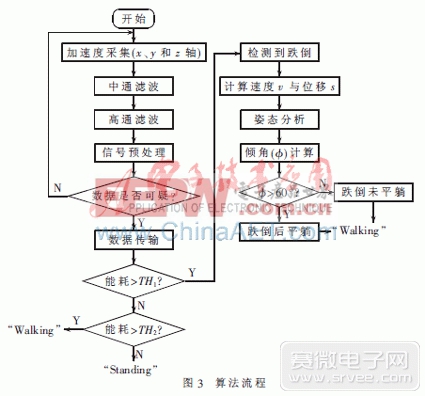
算法从开始到“数据传输”这部分的实现都是在用户终端实现,整个信号的预处理过程都是以一个采样窗体为基本单位,如果在一个采样时间内检测到疑似数据,则将此单位内的数据都传输至后台进行进一步的确认处理,否则,丢弃该数据段继续采集加速度信号。
在后台的数据处理阶段,主要是利用能量损耗进行分析并辅以特定时间内的人体v、s、Φ计算分析来提高系统检测的准确性。
3 实验与结果分析
为了验证算法的准确性,邀请了10位60岁以上老人进行试验,但在跌倒实验环节出于安全考虑没有让老人参与而是邀请了学生进行模拟摔倒(在垫子上完成)。实验的跌倒方式分为:向前/向后跌倒未平躺、向前/向后跌倒后平躺、向左/向右侧跌倒。依据这几种跌倒方式设计了一套如表1所示的动作。每一次实验的实验者都随机从中选出一些动作并结合真正的跌倒组合一套完整的实验动作。系统以45Hz的采样频率进行样本的采集,并通过设计的算法进行数据的分析处理。
实验者从上述的动作中随机选取动作组合进行实验,每名实验者需进行5组实验,10名实验者共需完成50组实验。实验统计结果如表1所示。

通过实验数据可知所设计的跌倒检测方法有较高的准确率,能够分辨绝大部分的跌倒事件,但在对跌倒后没有平躺事件和滑倒并迅速回复平衡的情况存在一定的误报率。
本文构建了基于三维加速度传感器、微处理器和无线通信模块为核心的跌倒检测模块,通过实验证明了其有效性,能够较好地区分日常活动和跌倒事件。在数据预处理上采取了基于1-class SVM的数据分类算法提取可疑数据,并创新性地提出了利用人体活动损耗的能量差异进行跌倒的最终判定,在确保系统的准确性上增加了对特定时域内的人体的姿态分析(对速度、位移及人体倾角的计算分析),取得了一定的成效。在用户终端对原始数据的分类处理上还需要对1-class SVM算法做进一步的改进。
风速传感器相关文章:风速传感器原理 高通滤波器相关文章:高通滤波器原理 蜂鸣器相关文章:蜂鸣器原理 矢量控制相关文章:矢量控制原理

评论