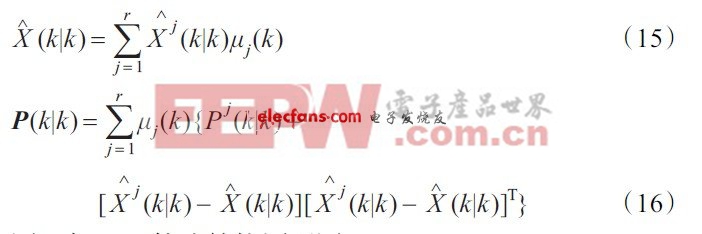
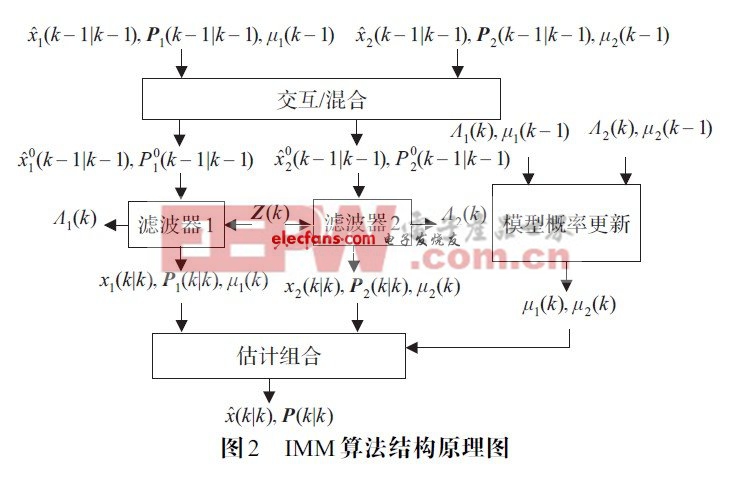
一种雷达防追尾预警系统设计 作者:时间:2011-08-02来源:网络收藏 步骤2 模型条件滤波: 对应于模型Mj(k),以X 0j (k - 1|k - 1),P0j(k - 1|k - 1)及Z(k)作为输入进行卡尔曼滤波。 卡尔曼预测方程: 预测误差协方差阵: 卡尔曼增益: 滤波方程为: 波误差方差阵: 步骤3 模型概率更新: i = 1rΛj(k)cj_,而Λj(k)为观测Z(k)的似然函数: 其中: 步骤4 输出交互:图2 为IMM算法结构原理图 上一页 1 2 3 下一页



















评论