基于车载CAN总线的倒车雷达单元设计
2 倒车雷达单元硬件设计
2.1 倒车雷达单元的整体设计
倒车雷达单元的整体结构如图2所示,本设计中倒车雷达以PIC18F258单片机为控制核心,控制超声波发射接收电路、温度修正电路工作。PIC18F258单片机本身带有CAN总线,这样可以减小电路的复杂性。超声波发射电路发出40 kHz的超声波,经障碍物反射后探头接收到反射波,单片机根据发射和接收时间差计算出障碍物与车的距离,并通过CAN总线以报文形式发送到仪表单元并显示,也可送到音响单元进行语音报警,当距离小于一定值时,相应的制动单元自动刹车。温度补偿电路采用数字温度传感器DS18B20,利用声速和温度之间的关系对声速进行校正,从而消除温度变化对声音的影响。本文引用地址:http://www.eepw.com.cn/article/197143.htm
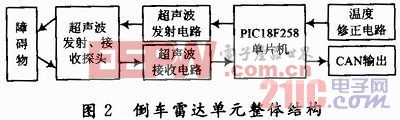
PIC18F258单片机有着先进的精简指令集构架、增强型内核,32级堆栈和多种内部、外部中断源,内部带有CAN总线控制器,并采用了程序和数据空间完全分开的“哈佛”结构,这种结构大大降低了总体成本,同时提高了运行效率和可靠性。
2.2 倒车雷达单元接口电路设计
CAN单元的硬件构成一般有两种形式。一种形式是内部集成CAN控制器的微控制器加上收发器;另外一种形式是通用微控制器加上独立CAN控制器再加上收发器。本设计采用前一种形式,不占用微控制器的端口资源,可以简化接口电路的设计。考虑到汽车是在非常特殊的环境下工作,所以选择了满足汽车温度变化范围且性价比较高的Mierochip公司的PIC18F258单片机,该芯片内部集成了CAN控制器,可以简化系统的硬件设计、提高系统的可靠性。倒车雷达单元与CAN总线接口硬件电路如图3所示,主要由PIC18F258单片机,6N137高速光电耦合器,PCA82 C250总线收发器三部分组成。
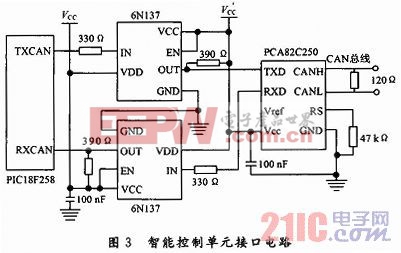
为了提高系统的抗干扰能力和传输信号的能力,采用6N137高速光电耦合电路可以很好地实现总线上单元之间的电气隔离。高速光电耦合器的两个电源Vcc和V'cc必须采用电源隔离电路进行完全隔离。
3 CAN总线通信软件设计
CAN总线上通信软件设计主要包括CAN单元初始化,报文发送和报文接收三部分。CAN接口的初始化程序设计非常重要,如果设计的不好,系统将不能正常工作其初始化首先要在配置模式下将控制寄存器、状态寄存器、波特率寄存器、I/O控制寄存器、接收掩码寄存器和几个滤波寄存器按照系统要求设置好,以保证CAN总线的畅通。
CAN总线通信主程序和中断服务程序框图如图4所示。

4 结语
本文应用PIC18F258单片机设计一种基于车载CAN总线倒车雷达单元,使其成为车载CAN网络的一个电气单元。给出了倒车雷达单元的总体结构,CAN总线接口电路及软件设计。倒车雷达单元主控芯片PIC18F258通过CAN总线能够向其他单元发送报文数据,其他控制器经过判别而实现相关的报警、显示、自动刹车等功能,提高了汽车的安全性。












评论