基于FPGA和高精度ADC的组合导航系统设计
INS/GPS组合导航系统在军事领域和民用方面的运动载体中得到了广泛应用。INS是组合导航系统中的核心部分,涉及多个陀螺仪、多个加速度计和温度传感器等众多传感器数据的采集与处理,同时对系统运算的实时性要求也很高。对于导航计算机系统的研究,许多学者做了大量有益的工作。传感器数据采集现有方案大多采用一片多路△-∑结构的AD芯片采集6路惯性器件信号,这就造成6路信号的数据采集不能同时进行,在高动态下导致组合导航系统导航精度的下降。本文以TI公司生产的AD变换器AD1274和Altera公司生产的FPGA EPlS30位主选芯片,阐述了组合导航系统的实现方法。
本文引用地址:http://www.eepw.com.cn/article/188935.htm2 数据采集
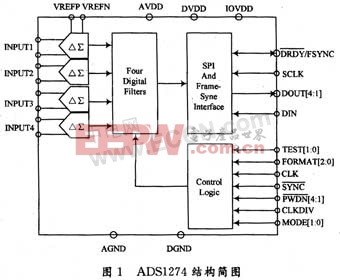
组合导航系统的传感器包括3个低成本微机械陀螺仪(AD'ADXRS150)、3个微机械加速度计(AD'ADXL210)、压力传感器(Motorola'MPX4115A)、二轴磁罗盘(Honeywel'HMC1022)、一个温度传感器(TI'TMP275)和GPS。对于这些传感器需同时采样,方能满足组合导航系统的要求。本系统选用TI公司生产的高精度模数转换器ADS1274。ADS1274是一款高性能的24位△-∑结构的AD转换器,有4路同步采样输入通道,输出有串行和并行两种方式,如1所示。
 |
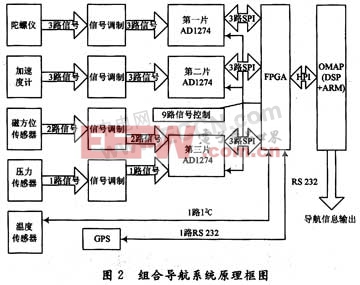
本系统中共采用3片AD1274,一片用于3个陀螺仪信号的数据采集;另一片用于3个加速度计的数据采集;第三片用于2个磁方位传感器、1个压力传感器的数据采集,温度传感器的输出信号为数字信号,不需要进行模数变换。每一片均剩余一路AD,用于今后深入研究的冗余系统。
为了克服由于传感器输出信号数据采集时间上的不同步引起的导航计算偏差,除采用具有4通道同步采用的AD1274外,数据采集系统的控制采用具有并行机制的FPGA,芯片选用Altera公司的Cyclone低成本FPGA EP1C6Q240。
3 组合导航系统的设计
组合导航系统的功能包括:
数据采集 采集各种传感器信号(陀螺仪、加速度计、磁罗盘、温度计、气压高程等);
预处理 采用数字滤波技术对采集到的传感器信号进行预处理;
导航计算 利用导航算法进行数据融合处理;
输出导航信息 将系统的位置、速度、姿态的功能信息输出到运动载体控制系统,进行导航指示和运动控制。
导航计算和导航信息输出采用TI的OMAP5912实现。组合导航系统原理如图2所示。
|
相关推荐
技术专区 |











评论