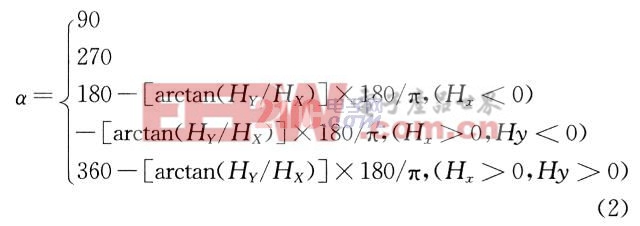
微型虚拟现实头部跟踪系统的设计 作者:时间:2010-03-25来源:网络收藏 3 方位、姿态求解算法3.1 求解航向角 地磁场磁感应强度大约为50~60μT,与地球表面平行的分量总是指向磁北极。在地平面上利用双轴磁阻效应传感器测定地磁场在磁阻效应传感器的X、Y轴上的分量XH和YH,就可确定在地平面上物体相对于磁北极的方位角φ。设定方位角φ=0时,磁阻效应传感器的X轴指向磁北极(正前方),Y轴指向右侧,方位角φ逆时针为正。根据测定的地磁场分量XH和YH,可计算出方位角φ为: 根据XH和YH的符号,可以获得方位角所处的象限,于是可根据式(2)求得正确的方位角: 上一页 1 2 3 4 下一页






评论