基于DM642的桥梁缆索表面缺陷图像采集及传输系统设
1 系统总体硬件设计及工作原理
德州仪器公司(TI)推出的TMS320DM642(简称DM642)是专门用于数字媒体应用的TMS320C6000家族中性能最高的定点DSP(最高工作频率可达720 MHz,处理能力可达5 760 MIPS),具有极强的单核处理能力以及高度的灵活性和可编程性。该芯片除了极强的处理能力外,还具有两级高速缓存L1 Cache和L2 Cache;64 bit的EDMA控制器,负责片内L2Cache与其他外设之间的数据传输; 64 bit EMIF(外部存储器接口)可以方便地与SDRAM、FLASH和UART实现无缝连接;3个视频专用端口(VP0、VP1、VP2),可分别配置为2路,最多可实现6路视频采集;支持PCI、HPI、IIC和EMAC(以太网),通信便利。其视频的编解码均支持NTSC/PAL制式,适用于音视频数据的采集和传输、图像处理、机器视觉、多媒体通信应用等高速运算领域[1,2]。
基于DM642的桥梁缆索表面缺陷检测系统主要由以下几大模块组成:图像采集模块、数据及程序存储模块、图像处理模块、图像传输模块、系统控制模块以及接收模块等。其主要硬件组成为:3路CCD摄像头、3个图像采集的A/D转换芯片SAA7113、高速图像采集及处理的DSP芯片DM642、图像数据存储器SDRAM、程序存储器FLASH、系统控制模块CPLD芯片EPM3128A、网络化传输芯片LXT971A、地面接收机(PC)以及其他功能模块等。其硬件框图如图1所示。
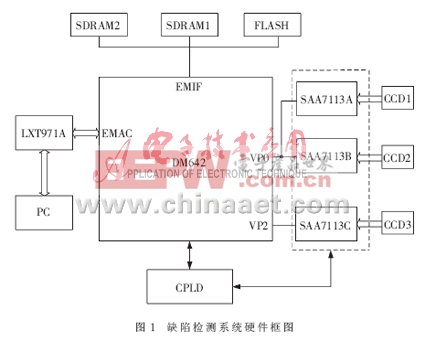
系统工作原理为:3路模拟视频经图像传感器(CCD)输入,经过3路A/D转换芯片SAA7113转换为数字信号,经过核心芯片DM642的视频输入口(VP0、VP2)进入DM642的FIFO(先入先出缓存器),再传输到DM642片外的同步动态存储器中;通过DM642的压缩编码经以太网口(EMAC)以及物理层收发芯片LXT971A传输到地面服务器(PC)。PC机接收到图像数据后,便进行图像的解码,并在屏幕上显示,通过图像处理算法实现缺陷检测。
本系统选用ALTERA公司MAX3000S系列中的CPLD芯片EPM3128A进行控制。CPLD与DM642、SAA7113、LXT971A、SDRAM、FLASH之间均使用通用可编程的I/O口相连,进行图像采集控制、图像数据的重抽样、地址译码、图像传输控制等,以满足本系统时序复杂、逻辑控制精确、可靠采集和传输等要求。
1.1 图像采集模块
由于缆索表面近似为圆柱形,系统中沿缆索机器人均匀布置3个CCD(每个CCD之间的夹角为120°)采集同一时刻缆索表面一周的图像。而DM642配置有3个专用的视频端口,每个端口可分别配置为2个通道,最多可实现6路视频的采集,故能满足本系统的要求。
为了同时支持3路视频信号的采集,本系统中DM642的视频口0(VP0)分成A、B 2个通道,分别作为2个8 bit的视频输入接口;视频口2(VP2)选用A通道作为8 bit的视频输入口,这样便实现了3路视频信号的采集。
系统的图像采集模块主要由:3路视频输入、3路视频A/D转换芯片SAA7113、视频端口的FIFO、I2C总线、同步动态存储器组成。
经摄像头(CCD)输出3路复合视频信号(CVBS),采用SAA7113专用视频解码芯片完成视频信号解码和转换功能[3,4]。在数字化过程中,由DM642的I2C总线进行控制,其输出格式可由I2C初始化其寄存器来设置。由于DM642的视频输入口只能接收标准的BT656-YUV4:2:2(8 bit)信号,故在I2C初始化时设置SAA7113的数字化输出格式为BT656的格式,可通过写IIC的寄存器来实现。进入视频端口的数据通过CPLD进行数据格式的转换(Y:U:V 4:2:2转换为4:2:0),当内部FIFO缓存器满时,产生中断,DM642通知EDMA(增强直接存储器存取)控制器通过EDMA方式将图像数据存储到SDRAM(同步动态存储器)中。
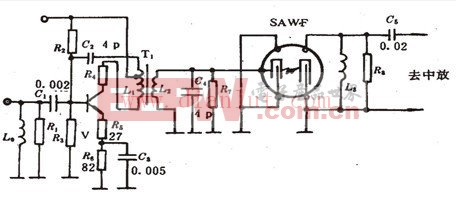
由于DM642的视频口VP0分成2个8 bit的通道A、B,所以SAA7113和DM642的连接方式只能采用最简连线的BT656的方式,即不需要水平、垂直、场同步信号线。图2所示为VP0端口的一路视频输入电路图,其他2路与该路基本相同。
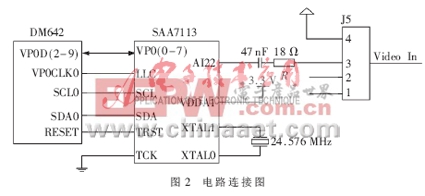
其中:输入视频经过J5接口的信号线3、上拉电阻(18 Ω)以及电容(47 nF),与SAA7113的模拟输入端AI22直接相连;VP0[0-7]为SAA7113的数据输出管脚,与DM642视频口0中的VP0D[2-9]管脚相连;时钟同步信号LLC与DM642视频口0的VP0CLK0相连;SCL和SDA作为I2C接口的时钟线和数据线,分别与DM642的I2C总线接口的时钟和数据线SCL0、SDA0相连;TRST作为复位信号与DM642的复位信号RESET相连;XTAL与XTAL1的管脚间接24.576 MHz的晶振,在VDDA1管脚上提供+3.3 V的电压供电,供芯片正常工作。
1.2 图像存储模块
(1)SDRAM
DM642芯片内部只集成了256 KB的RAM,因此需要在外部存储器接口(EMIF)上扩展存储空间。DM642的EMIF为64 bit的数据总线接口,工作的最高频率为133 MHz,分为4个存储空间(CE0-CE3),每个有256 MB的寻址空间。它在CE0空间提供了64 bit的SDRAM接口总线(无缝连接),分配给外扩的SDRAM使用[5-6]。本系统采用了2片32 bit的HY57V283220T-7 SDRAM芯片(为了符合64 bit的接口,必须采用2片32 bit的SDRAM),在片外扩展32 MB的动态存储空间。
SDRAM在CE0空间的具体定位为:0X80000000-0X81FFFFFF。输入模拟视频经数字化后进入视频端口的BT656(Y:U:V 4:2:2)数据流,以便于图像的压缩编码。在CPLD控制下实现图像数据的重抽样,之后通过EDMA的方式存储到SDRAM中。
(2)FLASH
本系统采用4 M×8 bit的AM29LV320D映射到CE1的低地址空间,用来存储程序,实现系统的自启动。它在CE1空间的具体定位为:0X90000000-0X9007FFFF。DM642的CE1空间被配置成8 bit,以适应自启动要求。4 MB的存储空间需要22根地址线来寻址,而DM642的EMIF口可用地址线只有20条。其中FLASH的最高2根地址线由DM642的GPIO中的GPIO1、GPIO2来模拟地址线,从而实现FLASH的页选。系统BOOT LOADING时,先从第一页拷贝1 K的启动代码到DM642,完成芯片初始化,控制GPIO1、GPIO2口线的组合,完成余下代码的导入。
1.3 图像传输模块
在所设计的系统中,3路CCD采集的缆索1周的图像,经数字化后同时送入DM642的视频端口,并且随着缆索爬升装置的爬升,不断重复采集。采集的图像数据量很大,持续时间较长。如果DM642通过图像处理算法,实时检测图像的缺陷,便要运行大量的算法程序,这就给DM642造成了很大的负担,因此本系统DM642只是对采集的图像数据进行压缩编码,并实时传输到地面的服务器(PC),具体图像识别算法在PC机上进行,这就大大减轻了DM642的负担,提高了DM642实时采集、传输的效率。
鉴于高速、大量图像数据的采集,系统采用DM642的网络接口实现传输。该系统中图像分辨率为720×576,帧频为25帧/s,采用H.263压缩编码算法,压缩比可达100:1,即数据流可压缩为:3×720×576×8×25÷100=2 488 340 b/s,约为2 500 kb/s。考虑到以太网传输,数据传输包头、包尾等附加数据,系统最大数据流为3 000 kb/s=3 Mb/s,而选用的网络接口芯片的传输速度为10 Mb/s,故可以实现图像数据的实时处理与传输。



评论