水下航行器模拟平台智能小车的设计
2.1.2 大气参数的采集
大气参数主要包括大气温度、大气压强和大气湿度,由相关的传感器采集,温压湿采集板的框图如图3所示。本文引用地址:http://www.eepw.com.cn/article/185452.htm
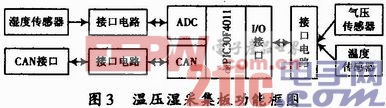
温度的测量使用高精度的传感器DS1820数字温度计来获取,提供了9位温度读数指示器件的温度,测量范围从-55~+125℃,增量值为0.5℃。
大气压强的测量用集成气压传感模块MS5561来实现,它是一款集成有压阻式压力传感器和ADC接口的SMD混合集成电路,可提供依赖于压力和温度的16位数据字,可通过3线串行接口与微处理器进行通信。
大气湿度的测量用高精度的传感器SY-HS-220来获取,只需通过单线接口与单片机相连,再通过A/D转换,算法处理即可获得湿度值。
2.1.3 数字罗盘
主要目的是给出平台的朝向值,来修正加速度和风向。S24-H是一个平面罗盘和双轴传感器的组合产品,由一个处理单元分别测量运算出罗盘和倾角的数据信息,然后放在同一组数据包中输出,产品输出接口同时提供TTL和485两种方式,默认传输速率为19 200 b/s。
2.1.4 激光测距系统
激光测量系统LMS200,是基于飞行时间测量原理(激光雷达),通过激光发射到被反射回激光测距仪的时间算出障碍物和激光测距仪之间的距离。

式中:ρ是障碍物到激光测距仪的距离;V是光速;t是从激光发出到被反射回来的时间。
2.2 远程无线板设计
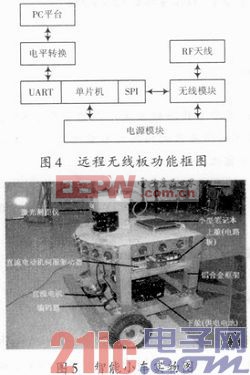
无线数据传输通过RFC-30F无线通信模块实现。RFC-30F单片无线收发器工作在433 MHz的ISM频段。由频率调制器、解调器、RF功放和调节控制器组成。远程无线板的框图如图4所示。
卫星接收模块采用中国台湾省长天科技股份有限公司产品,型号为GM-82,是一个具备全方位完整的卫星定位接收器。
2.3 电机的驱动部分
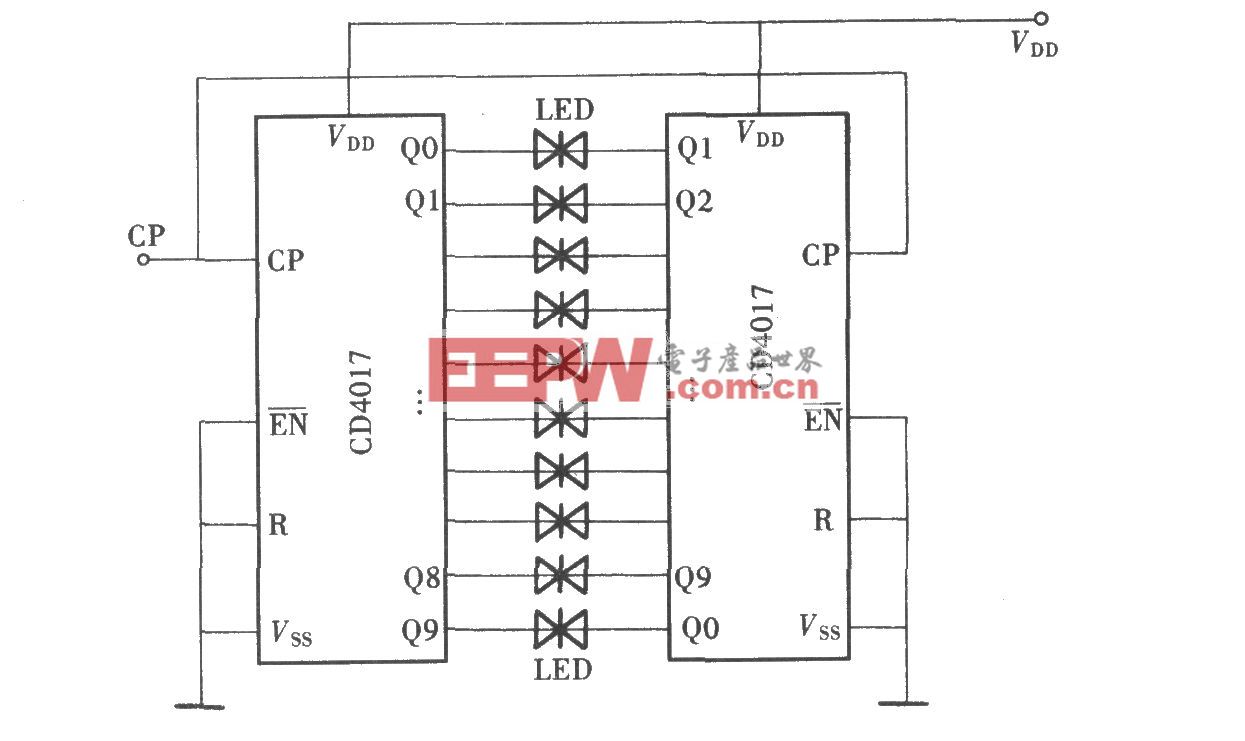
主要由空心杯直流电机、ED系列直流电动机伺服驱动器和编码器组成,通过单片机的普通I/O口和PWM控制直流电机驱动器,使空心杯直流电机在驱动器的控制下转动,编码器负责测量电机的实际转速,在程序上用电机的转速闭环(PID)控制,用无线控制手柄对速度进行实时的控制。实物图如图5所示。

pid控制相关文章:pid控制原理
模拟信号相关文章:什么是模拟信号











评论