基于空间矢量调制的三相矩阵式变换器

双空间矢量PWM调制是对输入电流和输出电压同步调制,逆变器部分的理想输出线电压基准矢量圆和整流器部分的理想输入相电流基准矢量圆都被划分为6个扇区,从而有36种可能的组合。以虚拟整流器、逆变器均工作在第I扇区为例,整个输入相电流和输出线电压矢量合成过程共有I6-U6,I6—U1,I1-U6,I1-U1及零矢量I0-U0五种组合。即
I6-U6:
Dxα=mumisin(60°-θi)sin(60°-θv)(4)
I6—U1:
Dxβ=mumisin(60°-θi)sinθv(5)
I1-U6:
Dyα=mumisinθisin(60°-θv)(6)
I1-U1:
Dyβ=mumisinθisinθv(7)
I0-U0:
D0=1-Dxα-Dxβ-Dyα-Dyβ(8)
式中:mi为电流的调制系数;
θi为输入相电流的相角;
θv为输出线电压的相角。
为减少输入线电流和输出线电压的谐波分量,我们采取对称空间矢量调制策略。如图5所示,在一个调制周期内,将上述开关组合占空比减半,并以零矢量为中心对称分布如下:1P,3N,4N,6P,0A,1P,3N,4N,6P。占空比:
Dxα/2→Dyα/2→Dyβ/2→Dxβ/2→D0→Dxβ/2→Dyβ/2→Dyα/2→Dxα/2
图5 8开关对称调制方案
Fig 5 the 8-switches double-sided modulator
3 GAL四步安全换流方案
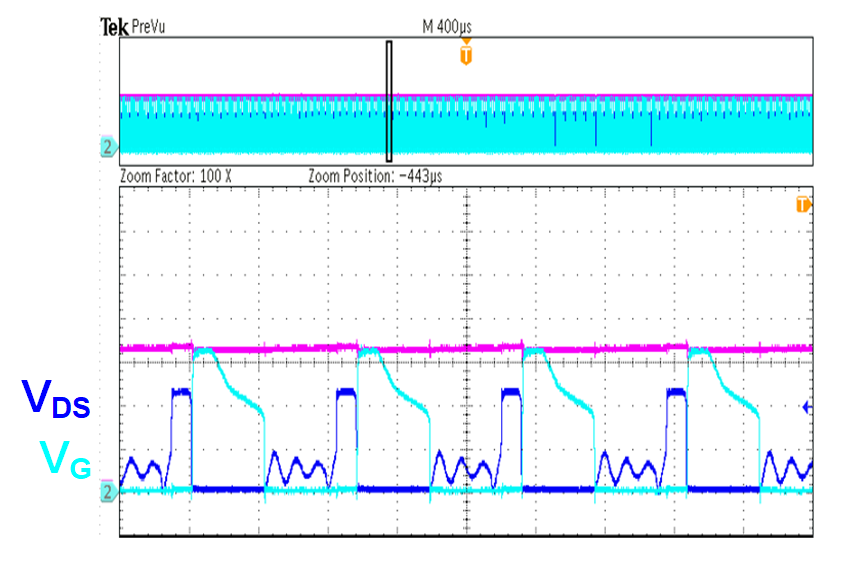
用图6中A相换流到B相为例说明:当负载电流iL>0时,第一步关断S1的负导通部分S1N;第二步开通S2的正导通部分S2P;第三步关断S1的正导通部分S1P;第四步开通S2的负导通部分S2N,这样就完成了两个双向开关之间的换流,其换流波形如图7所示,其中S1和S2为两个双向开关的理想控制信号。可见,四步换流成功地构成了对两个双向开关的换流控制,既禁止了可能使电源发生短路的开关组合,又保证了在任意时刻给负载提供至少一条流通路径。换流过程可用Lattice公司生产的复杂可编程逻辑器件GAL22V10来实现。
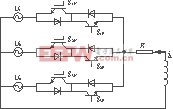
Fig 6 one phase circuit of matrix converter
图7是用GAL实现的安全四步换流的时序图。

图7 四步换流次序图
Fig 7 the sequence of four-step commutation
4 DSP实现
TMS320LF2407A具有25ns的指令周期,500nsA/D转换时间,低功耗3.3V设计,2个独立的事件管理器,4个定时/计数器,并于同类其它系列完全兼容。
为使输入电流与输入电压保持频率相位一致,需要对输入电压进行检测。输入电压通过三相输入同步变压器,过零比较器得到三相互相间隔120°的数字电平信号,分别送入DSP的3个IO口和捕获口,三相电平信号的上升沿和下降沿把输入电压空间矢量圆划分为6个扇区,设定DSP捕获单元对上升沿和下降沿均产生中断,以启动定时器对每个扇区定时,采样周期到达时读取定时器的计数值和IO口的电平情况,从而得出当前时刻输入电压矢量所在的扇区和相位,也就是得到了期望的输入电流矢量所在的扇区和相位。
DSP程序中,每100μs产生5个PWM脉冲,系统的采样频率是5kHz,输入电压每200μs采样一次。采用通用定时器1和通用定时器2,通用定时器1周期是100μs用来产生PWM脉冲和GAL的扇区值,通用定时器2周期是200μs用来采样输入电压、计算开关次数,并决定输出线电压和输入电流的扇区值。DSP的程序流程图如图8所示。
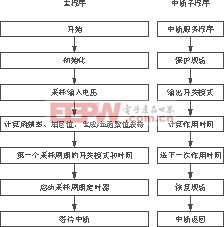
图8 DSP程序流程图
Fig 8 the flowchat of DSP program






评论