一种新型光伏电池最大功率点跟踪控制方法
3 改进爬山法研究
考虑到爬山法有较好的跟踪效率,且实现简单等显著优点,本文采用一种改进爬山法,该方法采用CVT启动及变步长的控制策略。CVT启动方法是以0.78倍的开路电压作为爬山法的运行初值,能较好地克服爬山法在启动时产生的采样误差的缺点,能提高跟踪速度。变步长控制法的思想是:当距最大功率点比较远时,步长取较大,跟踪速度加快;当距最大功率点比较近时,步长取较小,慢慢接近最大功率点;当非常接近最大功率点时,稳定在该点工作。该变步长法能克服爬山法在最大功率点附近振荡的缺点。改进爬山法控制流程图如图3所示。
4 改进爬山法仿真分析
光伏发电系统最大功率点跟踪器采用BooST
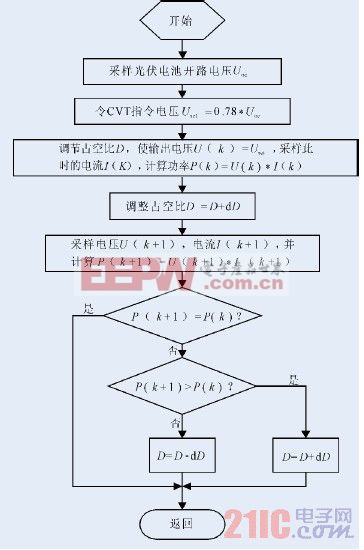
图3 改进爬山法控制流程图
DC/DC变换电路来实现,通过调节PWM波的占空比控制功率的输出。在Boost变换器的电路中串入MPPT控制系统,利用Matlab/simulink搭建仿真模型,编写S函数作为MPPT的控制模块,对光伏电池的最大功率点进行追踪,MPPT仿真模型如图4所示。
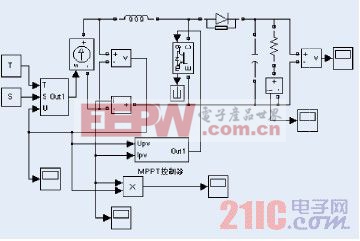
图4 MPPT仿真模型
对短路电流3.2 A、开路电压22 V、最大功率点电流2.94 A和最大功率点电压17 V的光伏电池模块组成17伊1的光伏电池阵列进行仿真,即其短路电流和光伏电池阵列的开路电压分别为3.2 V和374 V,光伏电池阵列最大功率点电流和最大功率点电压分别为2.94 A和289 V。光伏阵列输入光强为1 000 W/m2,温度为25 益。为了形成对比,对不加MPPT控制器的光伏发电系统、加爬山法MPPT控制器的光伏发电系统和加改进爬山法MPPT控制器的光伏发电系统分别进行仿真实验,仿真结果如图5所示。
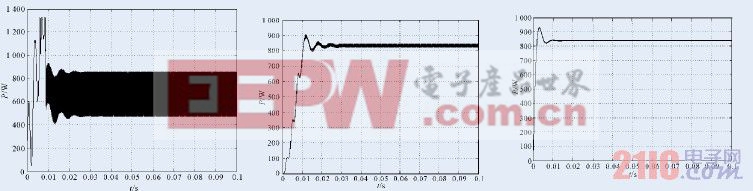
图5 MPPT仿真图形
由图5可见,未加MPPT控制的光伏电池输出功率振荡范围很大,输出功率很不稳定。爬山法MPPT控制系统能较好地跟踪到最大功率点,但是在最大功率点处还有一定振荡。改进爬山法的MPPT控制系统有效地改善了爬山法的缺点,在最大功率点附近振荡小,跟踪速度也比较快,提高最大功率跟踪的效率。
5 结论
综上所述,通过对几种常见的MPPT控制方法的比较研究,可以看出,恒定电压法控制简单且易实现,但跟踪精度差,在外界环境变化时,会产生较大误差;爬山法简单实用、跟踪效率高,但在最大功率点附近会发生振荡,存在误差;电导增量法虽然跟踪快速稳定,但由于实际的光伏发电系统中电压和电流的检测所依赖的传感器精度的有限性,采用电导增量法很难达到预期的最大功率跟踪效果。所以本文采用一种改进爬山法,并对其进行仿真实验,仿真实验证明基于变步长的改进爬山法能够克服爬山法存在的振荡现象和能量的损失,并且结合CVT启动能够更加快速地实现最大功率点跟踪。因此改进爬山法克服了常规跟踪算法中存在的效率低、能量损失大、不稳定等的缺点,可以很好地适应各种场合对光伏系统MPPT控制的要求,是一种较理想的MPPT控制方案。

dc相关文章:dc是什么
cvt相关文章:cvt原理
电荷放大器相关文章:电荷放大器原理 光伏发电相关文章:光伏发电原理









评论