TMS320F2812在车辆四轮转向控制系统中的应用

4 控制系统硬件设计与仿真
根据上文设计的控制策略,ECU单元要采集前轮转角信号、后轮转角信号、轮速信号并经过CPU运算输出电机的驱动电压,实现后轮自动转向。本文用C语言编制程序来实现设计的控制算法,并在仿真器连接的情况下,在CCS(Code Compose Studio)环境下完成硬件在环仿真调试。CCS2000是TI公司针对TMS320C2000系列DSP提供了一套基于Windows的DSP集成开发环境,也是目前最优秀的DSP开发软件。在CCS环境下,可进行程序开发、调试、编译、链接,支持汇编及C/C++进行软件开发,强大的调试工具如断点、探针、剖析及图形显示等,并最终可以进行输出目标文件的烧录。
4.1 前轮转角信号采集
前轮转角由绝对式角位移传感器得到,输出电压与前轮转角成线性正比例关系,范围0~12V。本文采用CS4U9806板的ADCHA0引脚采集,采样外围电路DSP芯片内部集成。此板单通道采样时间200nS,输入信号范围可通过跳线选择-5~+5V,0~10V,0~20V,默认-5~+5V。由于前轮转角范围有限,故跳线选择0~10V,采样频率设为96HZ。部分程序设计过程如下:

4.2 后轮转角信号采集
后轮转角信号由高精度的增量式光电编码器获得。它将蜗杆转动的角度根据转动的方向变为相应的增、减计数脉冲,每转一圈产生2048个脉冲,输出量为一时钟信号和一方向信号。本文采用DICH0(CAP2)引脚捕捉时钟信号,输入引脚DICH19(GPIOF12)取得方向信号。带光藕的开关量输入电路设计如图4,捕获单元电路DSP芯片内部集成。
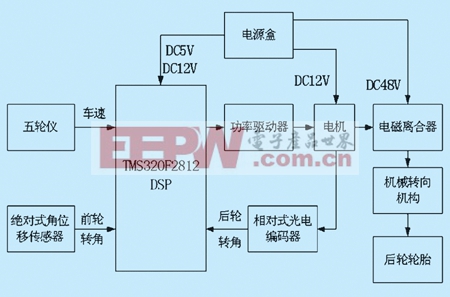
图4 输入电路框图
部分程序设计过程如下:
4.3 算法设计与D/A输出
算法的基本思路是:4WS启动时,输入一前轮转角,通过横摆率反馈,将其与速度相关的理想横摆率稳态响应增益G0进行比较,然后经控制器G1控制后轮转角,实现四轮转向,输出质心侧偏角、横摆率、侧向加速度用于监测,控制框图如图5所示。电机的驱动电压由DSP的比较寄存器产生PWM信号,在通过D/A 转换电路输出。本文采用定时器4产生PWM,由DA4引脚输出,一级放大的D/A转换电路如图6所示。
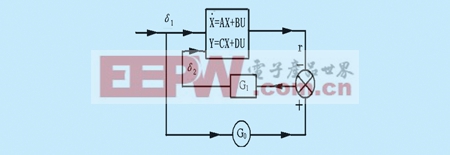
图5 控制框图
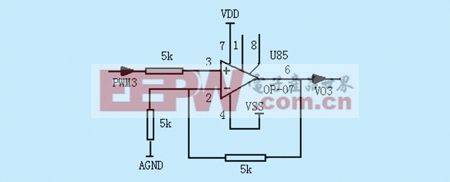
图6 D/A转换电路
部分程序设计过程如下:

伺服电机相关文章:伺服电机工作原理










评论