超声车距预警系统设计
摘要:设计一种超声车距预警系统,该系统采用单片机控制技术和超声波测距技术,通过显示障碍物与汽车的距离并根据其距离远近实时发出报警。该设计采用三传感器接收系统解决了障碍物的二维定位问题,并对所使用的车距预警系统进行了误差分析。
关键词:车距预警;超声波测距;单片机控制;二维定位
0 引言
随着汽车工业的发展,汽车不再是单纯的机械产品,而是各种科技集中的载体。车距预警系统的开发也成为提高汽车智能化的重要内容之一。该系统的运用可极大地降低倒车难度,避免驾驶员因方向感不强、判断和操作失误而引起事故,同时它将对提高汽车智能化水平和最终实现汽车无人驾驶产生积极的意义。
本文选择了现阶段广泛应用于车距预警系统中的超声波测距。超声波测距的成本较低,容易实现,可靠性较高。本设计可测量的范围为0.39~10.3 m,除了基本的超声波测距电路外,还有测温电路、车速检测电路、电源模块及语音报警电路。并且,系统采用三接收传感器的设计方案来确定障碍物的空间三维坐标位置。本设计具有操作简便、工作稳定可靠、检测速度快和成本低等特点,可实现无接触式测量,应用广泛。
1 超声波测距仪工作原理
本文的超声波测距中采用渡越时间检测法,发射器发射超声波,经过障碍物反射后被接收器接收,测量发射器发射和接收器接收超声波的时间差为t,同时,超声波在空气中的传播速度c受环境温度τ的影响较大,考虑了环境温度对传播速度的影响后,距离公式为:
![]()
本设计选用频率为40 kHz左右的超声波,它在空气中传播的效率最佳。同时,超声波探头(即超声波传感器)采用的是防水型收发一体式双晶片压电振动式超声换能器TCF40-25TR,其中心频率为(40±1)kHz,恰好适用于本设计的超声波频率。
2 车距预警系统的原理分析与硬件设计
在完成超声波测距的理论分析后,需要将超声波测距的硬件安装在车尾,这就需要进一步分析和设计车距预警系统。
2.1 车距预警系统的原理分析
超声波测距的目的是为了测得超声波探头到障碍物之间的距离,但是超声波测距系统无法对障碍物进行空间二维甚至是平面二维的定位。为了解决这个问题,本设计提出了三接收传感器的设计方案来确定障碍物的平面二维坐标位置。
若安装的位置间距不同,三个接收器探头接收回来的时间值是不一样的。由三个接收探头和超声波反射点可以确定一个空间四面体的全部边长参数,根据几何关系,通过这几个边长参数,可以求得超声波反射点的坐标值,亦即障碍物的具体位置。

如图1所示为车距预警系统的硬件结构设计,分别有单片机及其外围电路、超声波发射电路、超声波接收电路、测温电路、电源电路、车速检测电路和语音报警电路。
2.2 车距预警系统的硬件设计
2.2.1 单片机及其外围电路的设计
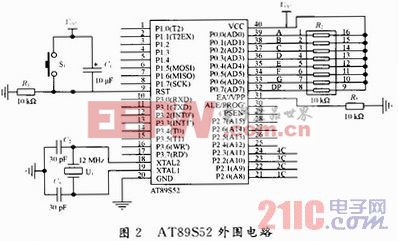
在本设计中,主控芯片选择的是单片机AT89S52。最小系统由AT89S52芯片以及外围电路组成(如图2所示),是整个超声波测距系统的核心部分。












评论