LED机械应力失效分析

1 、失效模式:
产品中相同结构手插件 LED 的失效位号随机分布,失效比例高的 LED 集中在近离 PCB 板面的 LED 。 LED 的结构参考 figure 1 。
2 、失效机理:
组装时的机械应力导致 LED 引脚移位,使外引脚和内金线脱离而开路。
• 产品组装时因 前面板和机壳咬合不顺畅,装配后前面板与机壳间存在缝隙,操作员将 使用锤子敲击前面板。锤子误敲击在 LED 本体上时, LED 本体将向后移( LED 已经焊接在 PCB 上,两引脚固定),两引脚同时承受弯曲应力;

在下面位置的 LED 引脚暴露较短, LED 后移时承受比上面位置 LED 更大的弯曲应力,当该力大于 LED 塑封体对引脚的阻力时,引脚发生位移并破坏 LED 塑料本体发生失效。
• 器件过波峰时无模具固定 LED 位置, LED 易偏移,在组装时需对器件位置矫正,当矫正距离和力够大时也会造成 LED 承受机械应力。
• 在上面位置的 LED 由于引脚长,并引脚弯曲位置离 LED 本体相对远,引脚变形允许范围和应力传递距离比在下面位置的 LED 大,所以失效率远低于下面位置的 LED 。
3 、分析步骤:
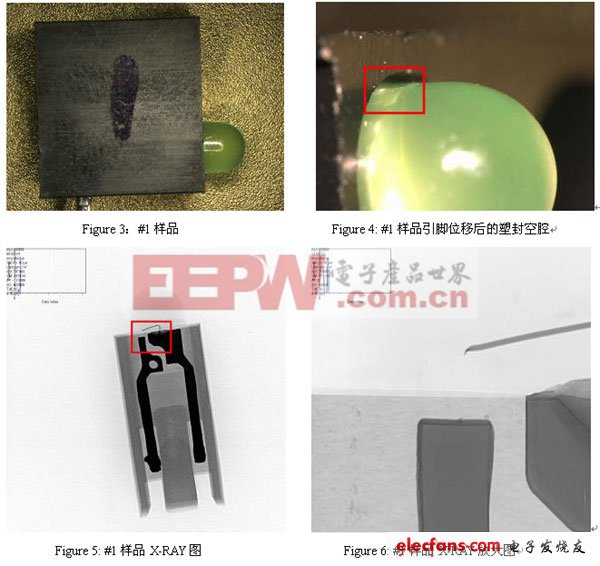
Step 1: 外观检测和 X-RAY 检测
• 器件内部金线在钎焊端与引脚(正极)开路,引脚存在位移( figure 5 、 7 、 9 );金线断口成尖形,为金属机械拉尖( figure 6 、 8 、 10 );
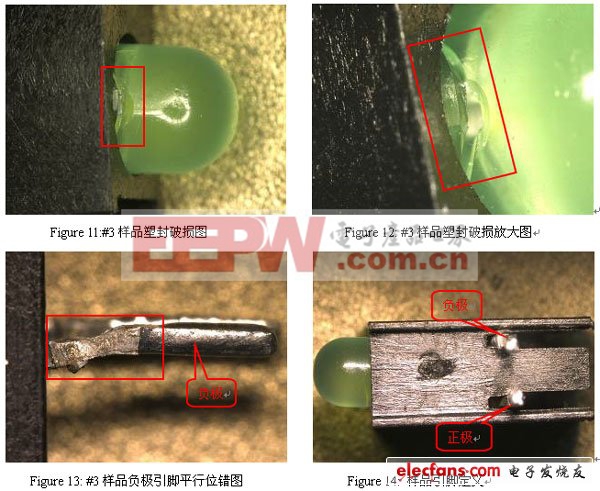
• 在 #3 样品外观可观察到引脚错位( figure 13 )和塑封外壳破损( figure 12 )。
结合 1 、 2 说明引脚承受了向外的拉伸机械应力;
发生位移量大的引脚均是与金线钎焊的引脚(正极),因为该引脚线性度较大, LED 塑封对引脚的阻力小。
• #3 样品负极引脚外露部分平行位错;说明焊接后 LED 本体曾向前移动。(由于 LED 塑封体对负极引脚的阻力较大,因此当向前推时负极整体引脚不易移动,而只能是局部区域发生位错)。










评论